
If you’ve been following the arXiv, or keeping abreast of developments in high-energy theory more broadly, you may have noticed that the longstanding black hole information paradox seems to have entered a new phase, instigated by a pair of papers [1,2] that appeared simultaneously in the summer of 2019. Over 200 subsequent papers have since appeared on the subject of “islands”—subleading saddles in the gravitational path integral that enable one to compute the Page curve, the signature of unitary black hole evaporation. Due to my skepticism towards certain aspects of these constructions (which I’ll come to below), my brain has largely rebelled against boarding this particular hype train. However, I was recently asked to explain them at the HET group seminar here at Nordita, which provided the opportunity (read: forced me) to prepare a general overview of what it’s all about. Given the wide interest and positive response to the talk, I’ve converted it into the present post to make it publicly available.
Well, most of it: during the talk I spent some time introducing black hole thermodynamics and the information paradox. Since I’ve written about these topics at length already, I’ll simply refer you to those posts for more background information. If you’re not already familiar with firewalls, I suggest reading them first before continuing. It’s ok, I’ll wait.
Done? Great; let me summarize the pre-island state of affairs with the following two images, which I took from the post-island review [3] (also worth a read):

On the left is the Penrose diagram for an evaporating black hole in asymptotically Minkowski space. We suppose the black hole formed from some initially pure state of matter (in this case, a star, denoted in yellow), and evaporates completely via the production of Hawking radiation (represented by the pairs of squiggly lines). The key thing to note is that the Hawking modes are pairwise entangled: the interior partner is trapped behind the horizon and eventually hits the singularity, while the exterior partner is free to escape to infinity as Hawking radiation. An observer who remains far outside the black hole and attempts to collect this radiation will then find the final state to be highly mixed (in fact, almost thermal), since along any timeslice (the green slices), she only has access to the modes outside the horizon. But since we took the initial state to be pure (entropy 
The evaporation process is depicted in the right figure, which schematically plots various relevant entropies over time. On the one hand, the Bekenstein-Hawking entropy of the black hole starts at some large value given by the surface area, and steadily decreases as the hole evaporates (orange curve). Meanwhile, the entropy of the radiation starts at zero, and then steadily increases over time as more and more modes are collected. This is the result given in Hawking’s original calculation [4], represented by the green curve. The expectation from unitarity is that the entropy of the radiation should instead follow the so-called Page curve, shown in purple. The idea is that at around the halfway point — more accurately, the point at which the entropy of the radiation equals the entropy of the horizon — the emitted modes start to purify the previously-collected radiation, so the entropy starts to decrease. Eventually, when the black hole has completely evaporated and all the “information” has been emitted, the radiation should again be in a pure state with
In a nutshell, the island formula is a prescription for computing the entropy of the radiation in such a way as to reproduce the Page curve. The claim is that instead of naïvely tracing-out the black hole interior, one should assign the radiation the generalized entropy
![\displaystyle S_\mathrm{rad}=\mathrm{min}_\mathcal{X}\left\{\mathrm{ext}_\mathcal{X}\left[\frac{A(\mathcal{X})}{4G_N}+S_\mathrm{semi-cl}\left(\Sigma_\mathrm{rad}\cup\Sigma_\mathrm{island}\right)\right]\right\}~, \ \ \ \ \ (1)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+S_%5Cmathrm%7Brad%7D%3D%5Cmathrm%7Bmin%7D_%5Cmathcal%7BX%7D%5Cleft%5C%7B%5Cmathrm%7Bext%7D_%5Cmathcal%7BX%7D%5Cleft%5B%5Cfrac%7BA%28%5Cmathcal%7BX%7D%29%7D%7B4G_N%7D%2BS_%5Cmathrm%7Bsemi-cl%7D%5Cleft%28%5CSigma_%5Cmathrm%7Brad%7D%5Ccup%5CSigma_%5Cmathrm%7Bisland%7D%5Cright%29%5Cright%5D%5Cright%5C%7D%7E%2C+%5C+%5C+%5C+%5C+%5C+%281%29&bg=ffffff&fg=000000&s=0&c=20201002)
where 



Quantum Extremal Surfaces
While the Penrose diagram above (and most of those below) depicts a black hole in asymptotically flat space, the island formula (1) is properly formulated in AdS/CFT, which is where our story begins. In the interest of making this maximally accessible, let’s start at the beginning with my favourite picture of the hyperbolic disc, courtesy of M. C. Escher:
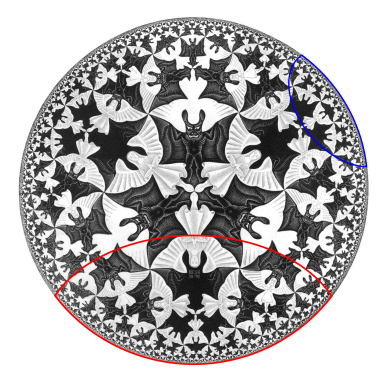
Here we have a gravitational theory living in the bulk anti-de Sitter (AdS) space, which is dual to some conformal field theory (CFT) living on the asymptotic boundary. (Since this picture is necessarily embedded in flat space, the hyperbolic nature of the bulk manifests in the fact that the devils are all the same size). Inherent in the nature of a duality is that every element on one side has an equivalent element on the other, and a major research area in AdS/CFT is completing the so-called holographic dictionary that relates them. One of the major lessons of the past decade is that entanglement entropy appears to play a significant role in this mapping. In particular, the Ryu-Takayanagi formula [5] states that the von Neumann entropy of a boundary subregion — e.g., the blue or red boundary segments I’ve drawn over the image above — is given by the area of the co-dimension 2 minimal surface in the bulk anchored to the boundary of said region that satisfies the homology constraint (see below) — e.g., the blue or red arcs extending towards the center — called the Ryu-Takayanagi or RT surface. More generally, the idea is that all of the physics within the enclosed bulk region can be described by operators living in the corresponding boundary segment (more precisely, its causal domain of dependence).
The most salient aspect of this proposal for our purposes is that it has precisely the same form as the Bekenstein-Hawking entropy, i.e.,

where 


where for consistency I’ve denoted the entropy of the radiation
Formally, the generalized entropy (3) is exactly the quantity that appears in the innermost brackets in the island formula (1), subject to the details of how one selects what semi-classical entropy to compute—more on this below. What about the 
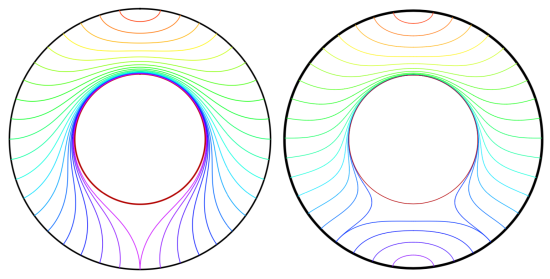
This is again the hyperbolic disc, but with a large AdS black hole whose horizon is demarcated by the inner circle. Now imagine starting with a small boundary subregion at the top of the image, whose corresponding bulk RT surface is drawn in red. As we make this region progressively larger, the RT surface lies deeper and deeper into the bulk—this is represented by the shading from red towards violet. Since the surfaces are defined geometrically, they are sensitive to the presence of the black hole, and get deformed around it as we include more and more of the boundary in the subregion under consideration. Eventually the subregion includes the entire boundary, and the corresponding RT surface is the violet one in the left image. For BTZ black holes, that’s it.
In higher dimensions however, there’s a second RT surface that becomes relevant when the subregion reaches a certain size. Consider the right image, at the point where the RT surface for the subregion is blue. The old solution is the RT surface that loops back around the black hole, on the same side as the boundary subregion. The new solution is the RT surface that connects these same two boundary points on the opposite (that is, lower) side of the black hole, plus a piece that wraps around the horizon itself. The horizon is included because the RT prescription requires the surface to be homologous to the boundary (crudely speaking, we wrap a second piece around the black hole in order to excise the hole from the manifold, so that the solution remains in the same homology class. The fact that one must consider disconnected surfaces may seem rather bizarre, but there’s nothing intrinsically pathological about it; see [7] for more discussion and additional references on the homology constraint in this context). One can see visually that when the boundary subregion reaches a certain size, the combined length of these two pieces will be smaller than the length of the old RT surface that has to go around the black hole the long way. A priori, we now have an ambiguity in which bulk entity we identify with the entropy of the boundary subregion, which is resolved by the requirement that we choose the minimum among all such choices. (While I’m unaware of a satisfactory physical explanation for this, it appears necessary in order for the generalized entropy to satisfy subadditivity [8]). Therefore, as the size of the boundary subregion is continuously increased, a discontinuous (i.e., non-perturbative) switchover occurs to the new minimal surface. As we shall see, a similar switchover plays a crucial role in the island computation of the Page curve.
Now, a quantum extremal surface (QES) is a seemingly mild correction to the above prescription, whereby the semi-classical contribution is taken into account when selecting the surface itself. That is, in the above RT prescription, we selected the minimal surface (which fixes the area term in (3)), and then added the entropy of all the matter fields living between that fixed surface and the boundary (the second term in (3)). As argued in [9] however, the correct procedure is to instead find the surface such that the combination of both terms is extremized, which defines the QES, denoted 







In most cases, the difference between the QES and its classical counterpart is relatively small. However, the remarkable feature uncovered in [1,2] is that this can sometimes be quite large, and furthermore, that the QES can sometimes lie deep inside the black hole. This is in sharp contrast to the classical RT surfaces discussed above: as one can see in those rainbow images from [7], they never reach beyond the horizon. (In fact, this appears to be a limitation of all such classical probes, as my colleagues and I analyzed in detail when I was a PhD student [10]: one can get exponentially close to the horizon in some cases, but no better. The corresponding “holographic shadows” seem to represent a puzzle for holographers, since — as per AdS/CFT being a duality — the boundary must have a complete and equivalent description of the physics in the bulk, including the black hole).
These two elements — the minimality requirement, and the ability of QESs to probe behind horizons — are the key to islands.
Some Flat Space Intuition
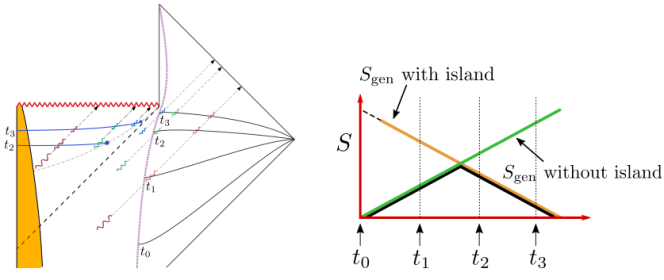
Let us set holography aside for the moment, and return to the flat space Penrose diagram for an evaporating black hole we introduced above. The review [3] does a great job painting an intuitive picture of how the QES changes the story. In particular, the various ingredients in (1) are shown in the following Penrose diagram:

The basic idea is as follows: suppose one is an external observer moving along the timelike trajectory given by the dashed purple line, who collects Hawking radiation that escapes to infinity. The latter comprises the semi-classical entropy along 
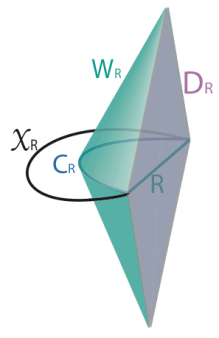
To understand why this QES appears, consider the following diagram, again from [3]. Suppose we fix a Cauchy slice at some point in the evaporation process (say, time 

If we repeat this process along an earlier Cauchy slice however, the picture is quite different. Before any radiation has been emitted, shrinking
We thus have two possible choices for the QES 


Shortly after the black hole starts to evaporate however, the second, non-vanishing QES appears some distance inside the horizon. The corresponding area contribution is initially very large, but steadily decreases as the hole evaporates. Crucially, the semi-classical contribution also declines, since we count modes in the union 
Since we’re instructed to always use the minimum QES, a switchover analogous to that we discussed in the context of RT surfaces thus occurs at the Page time: at this point, the area of the non-empty QES (which dominates over the corresponding semi-classical contribution) equals the semi-classical contribution from the empty QES. We therefore follow the black curve in the plot, which is the sought-after Page curve, where the change from an increasing (green) to decreasing (orange) entropy corresponds to a non-perturbative shift in the location of the minimal QES. In this way, the island formula obtains a result for the generalized entropy consistent with our expectations from unitarity.
However, while the exposition above paints a nice intuitive picture, it’s ultimately just a cartoon, and leaves many physical aspects unexplained—for example, how the interior “island” is able to purify the radiation, or the dependence of (the location of)
Just drink the Kool-Aid
There are two main stumbling blocks that must be overcome for the picture we’ve painted above to work:
- Large black holes in AdS don’t evaporate.
- The identification of the island with the radiation is ultimately imposed by hand.
The first of these is due to the fact that large AdS black holes, unlike their flat-space counterparts, are microcanonically stable: they have 

To circumvent this, [1,2] coupled the system to an auxiliary reservoir in order to force the black hole to evaporate. This is illustrated by the following figure from [2], in which a coupling between the asymptotic boundary and a previously-independent CFT that acts as a bath is turned on at the time indicated by the orange dot. Prior to this, radiation from the AdS
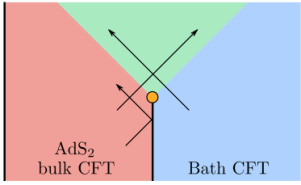
This is approximately the point at which I get off the metaphorical train. In particular, insofar as AdS/CFT is a duality between equivalent descriptions of the same system, not two systems that interact at some physical boundary, the so-called “absorbing boundary conditions” [1,2] claim when performing this operation do not appear to me to be valid. Another way to express this underlying point is that it is incorrect to treat the bulk and boundary as akin to tensor factorizations of a single all-encompassing Hilbert space. Rather, the radiation — which carries some finite energy — has an equivalent description in the boundary CFT. Allowing it to propagate into the boundary simultaneously decreases the energy of the bulk while increasing the energy of the boundary, thereby breaking the duality. Following the initial works above, an interesting attempt was made in [13] to make this construction more plausible by allowing the auxiliary system itself to be holographic. However, while the resulting “double holography” model is more technically refined, it ultimately still features fields propagating between different sides of the duality, so does not actually overcome the fundamental objection above.
Suppose however that one accepts such forced-evaporation models for the sake of argument—after all, the entire point of a toy model is to grant a sufficient deviation from reality that calculations become tractable (the tricky bit, and the focus of my skepticism here, lies in determining how much physics is retained in the result). One then has to contend with the second roadblock, namely identifying the radiation — now contained in the auxiliary reservoir — with the interior island. That is, when we wrote down the island formula (1), the semi-classical term was defined as the entropy over the union
Proponents of the island prescription would disagree with this claim. The review [3] for example addresses it explicitly as follows:
“Now a skeptic would say: `Ah, all you have done is to include the interior region. As I have always been saying, if you include the interior region you get a pure state,’ or `This is only an accounting trick.’ But we did not include the interior `by hand’. The fine-grained entropy formula is derived from the gravitational path integral through a method conceptually similar to the derivation of the black hole entropy by Gibbons and Hawking…”
The calculation they refer to is the replica trick for computing entanglement entropy, which I’ve written about before. And indeed, at least two papers [11,12] have claimed to derive the island formula via precisely such a replica wormhole calculation. The underlying idea is actually rather beautiful: the switchover to the new QES corresponds to an initially sub-leading saddlepoint in the gravitational path integral which becomes dominant at the Page time. (There’s a pedagogically exemplary talk on YouTube by Douglas Stanford in which he explains how this comes about in the toy model of [11]). The issue here is not that there’s anything wrong with the technical aspects of the above derivations per se. However, as I’ve stressed before, the conclusions one can draw from any derivation are dependent on the assumptions that go into it. In this case, the key assumption is that when sewing the replicas together, we make a cut along what becomes the island. That is, when we perform the replica trick, we make 

In derivations of the island formula, one makes a disjoint cut along
A proponent might argue that there are good reasons to join the replicas in this fashion; but producing the correct answer a posteriori should not be one of them. In short, my unfashionable opinion is that the claim in [12] that “[t]his new saddle suggests that we should think of the inside of the black hole as a subsystem of the outgoing Hawking radiation” is, at least at this point in our collective explorations/explanations, backwards: rather, if you think of the inside of the black hole as a subsystem of the outgoing Hawking radiation, you will get a new saddle. The logic works both ways in principle, I’m simply not quite convinced that we’ve justified running it in the popular direction.
Even if the island prescription is (ontologically) correct — and it may well be — it does not suffice to resolve the firewall paradox, for several reasons. Physically, it does not explain how the radiation is purified from an operational perspective, i.e., how unitarity is restored from a pure bulk entropy calculation (e.g., in Minkowski space without any bells and whistles). Additionally, it does not explain where Hawking’s original calculation [4] went wrong. Abstractly, one would say that the error is that he did not include this sub-leading saddle, which arises from the different ways of connecting the replica geometries. But insofar as Hawking’s calculation does not employ a gravitational path integral at all, an interesting open question that would likely shed light on the underlying physics of the island prescription is how to bridge the conceptual gap between the calculation via replica wormholes and the more down-to-earth calculation via Bogolyubov coefficients in the black hole scattering matrix.
To be sure, this is still a very interesting and non-trivial result. It’s remarkable that the bulk gravitational path integral includes these crucial replica wormhole geometries, despite the fact that the
References
- G. Penington, “Entanglement Wedge Reconstruction and the Information Paradox,” JHEP 09 (2020) 002, arXiv:1905.08255.
- A. Almheiri, N. Engelhardt, D. Marolf, and H. Maxfield, “The entropy of bulk quantum fields and the entanglement wedge of an evaporating black hole,” JHEP 12 (2019) 063, arXiv:1905.08762.
- A. Almheiri, T. Hartman, J. Maldacena, E. Shaghoulian, and A. Tajdini, “The entropy of Hawking radiation,” arXiv:2006.06872.
- S. W. Hawking, “Breakdown of predictability in gravitational collapse,” Phys. Rev. D 14 (Nov, 1976) 2460–2473.
- S. Ryu and T. Takayanagi, “Holographic derivation of entanglement entropy from AdS/CFT,” Phys. Rev. Lett. 96 (2006) 181602, arXiv:hep-th/0603001.
- T. Faulkner, A. Lewkowycz, and J. Maldacena, “Quantum corrections to holographic entanglement entropy,” JHEP 11 (2013) 074, arXiv:1307.2892.
- V. E. Hubeny, H. Maxfield, M. Rangamani, and E. Tonni, “Holographic entanglement plateaux,” JHEP 08 (2013) 092, arXiv:1306.4004.
- M. Headrick and T. Takayanagi, “A Holographic proof of the strong subadditivity of entanglement entropy,” Phys. Rev. D 76 (2007) 106013, arXiv:0704.3719.
- N. Engelhardt and A. C. Wall, “Quantum Extremal Surfaces: Holographic Entanglement Entropy beyond the Classical Regime,” JHEP 01 (2015) 073, arXiv:1408.3203.
- B. Freivogel, R. Jefferson, L. Kabir, B. Mosk, and I.-S. Yang, “Casting Shadows on Holographic Reconstruction,” Phys. Rev. D 91 no. 8, (2015) 086013, arXiv:1412.5175.
- G. Penington, S. H. Shenker, D. Stanford, and Z. Yang, “Replica wormholes and the black hole interior,” arXiv:1911.11977.
- A. Almheiri, T. Hartman, J. Maldacena, E. Shaghoulian, and A. Tajdini, “Replica Wormholes and the Entropy of Hawking Radiation,” JHEP 05 (2020) 013, arXiv:1911.12333.
- A. Almheiri, R. Mahajan, J. Maldacena, and Y. Zhao, “The Page curve of Hawking radiation from semiclassical geometry,” JHEP 03 (2020) 149, arXiv:1908.10996.
- P. Calabrese and J. Cardy, “Entanglement entropy and conformal field theory,” J. Phys. A 42 (2009) 504005, arXiv:0905.4013.
- D. Marolf and H. Maxfield, “Transcending the ensemble: baby universes, spacetime wormholes, and the order and disorder of black hole information,” JHEP 08 (2020) 044, arXiv:2002.08950
- R. Jefferson, “Comments on black hole interiors and modular inclusions,” SciPost Phys. 6 no. 4, (2019) 042, arXiv:1811.08900.
- R. Jefferson, “Black holes and quantum entanglement,” arXiv:1901.01149.
- E. Witten, “Gravity and the crossed product,” JHEP 10 (2022) 008, arXiv:2112.12828.
 in
in  -dimensional Minkowski (i.e., flat) spacetime. From
-dimensional Minkowski (i.e., flat) spacetime. From 
 ,
,  , and the creation/annihilation operators satisfy the standard equal-time commutation relation, which in our convention is
, and the creation/annihilation operators satisfy the standard equal-time commutation relation, which in our convention is ![{\big[a_k,a_{k'}^\dagger\big]=4\pi\omega\delta(\mathbf{k}-\mathbf{k}')}](https://s0.wp.com/latex.php?latex=%7B%5Cbig%5Ba_k%2Ca_%7Bk%27%7D%5E%5Cdagger%5Cbig%5D%3D4%5Cpi%5Comega%5Cdelta%28%5Cmathbf%7Bk%7D-%5Cmathbf%7Bk%7D%27%29%7D&bg=ffffff&fg=000000&s=0&c=20201002) , with the vacuum state
, with the vacuum state  such that
such that  . (The derivation of this commutation relation, as well as the reason for splitting the normalization in this particular way when identifying the modes
. (The derivation of this commutation relation, as well as the reason for splitting the normalization in this particular way when identifying the modes  , will be discussed below). Typically, we choose the positive solution to the Klein-Gordon equation,
, will be discussed below). Typically, we choose the positive solution to the Klein-Gordon equation,  , so that the operator
, so that the operator  has an interpretation as the creation operator for a positive-frequency mode traveling forwards in time. Note however that this statement depends on the existence of a global timelike Killing vector. That is, the modes
has an interpretation as the creation operator for a positive-frequency mode traveling forwards in time. Note however that this statement depends on the existence of a global timelike Killing vector. That is, the modes  are of positive frequency with respect to some time parameter
are of positive frequency with respect to some time parameter  , by which we mean they’re eigenfunctions of the operator
, by which we mean they’re eigenfunctions of the operator  with eigenvalue
with eigenvalue 

 , i.e.,
, i.e.,  . Since both sets of modes are complete, they must be linear combinations of one another, i.e.,
. Since both sets of modes are complete, they must be linear combinations of one another, i.e.,
 ,
,  are called Bogolyubov coefficients. (Note that unlike [1], we’re working directly in the continuum, so the coefficients should be interpreted as continuous functions rather than discrete matrices). These can be determined by appealing to the normalization condition imposed by the Klein-Gordon inner product,
are called Bogolyubov coefficients. (Note that unlike [1], we’re working directly in the continuum, so the coefficients should be interpreted as continuous functions rather than discrete matrices). These can be determined by appealing to the normalization condition imposed by the Klein-Gordon inner product,![\displaystyle (f,g)\equiv i\int_t\left[\,\left(\partial_tf\right) g^*-f\partial_tg^*\right]~, \ \ \ \ \ (5)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%28f%2Cg%29%5Cequiv+i%5Cint_t%5Cleft%5B%5C%2C%5Cleft%28%5Cpartial_tf%5Cright%29+g%5E%2A-f%5Cpartial_tg%5E%2A%5Cright%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%285%29&bg=ffffff&fg=000000&s=0&c=20201002)
 . The idea behind this choice of inner product is that it allows the easy extraction of the Fourier coefficients from (1) as follows:
. The idea behind this choice of inner product is that it allows the easy extraction of the Fourier coefficients from (1) as follows:

 , hence the funny split in the normalization we mentioned below (1) (for our notation/normalization conventions, see
, hence the funny split in the normalization we mentioned below (1) (for our notation/normalization conventions, see ![\displaystyle \begin{aligned} (u_k,u_p)&=i\int\!\mathrm{d}\mathbf{x}\,\left[\,\left(\partial_tu_k\right) u_p^*-u_k\partial_tu_p^*\right] =2\omega\!\int\!\mathrm{d}\mathbf{x}\,u_ku_p^*\\ &=\frac{1}{2\pi}\int\!\mathrm{d}\mathbf{x}\,e^{i(\mathbf{k}-\mathbf{p})\mathbf{x}} =\delta(\mathbf{k}-\mathbf{p})~. \end{aligned} \ \ \ \ \ (8)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+%28u_k%2Cu_p%29%26%3Di%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bx%7D%5C%2C%5Cleft%5B%5C%2C%5Cleft%28%5Cpartial_tu_k%5Cright%29+u_p%5E%2A-u_k%5Cpartial_tu_p%5E%2A%5Cright%5D+%3D2%5Comega%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bx%7D%5C%2Cu_ku_p%5E%2A%5C%5C+%26%3D%5Cfrac%7B1%7D%7B2%5Cpi%7D%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bx%7D%5C%2Ce%5E%7Bi%28%5Cmathbf%7Bk%7D-%5Cmathbf%7Bp%7D%29%5Cmathbf%7Bx%7D%7D+%3D%5Cdelta%28%5Cmathbf%7Bk%7D-%5Cmathbf%7Bp%7D%29%7E.+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%288%29&bg=ffffff&fg=000000&s=0&c=20201002)

![\displaystyle \begin{aligned} (\bar u_p,u_k)&=i\!\int\!\mathrm{d}\mathbf{x}\,\left[\,\left(\partial_t\bar u_p\right){u_k}^*-\bar u_p\,\partial_t{u_k}^*\right]\\ &=i\!\int\!\mathrm{d}\mathbf{x}\mathrm{d}\mathbf{j}\,\big[\left(\alpha_{jp}\partial_t u_j+\beta_{jp}\partial_tu_j^*\right){u_k}^*-\left(\alpha_{jp}u_j+\beta_{jp}u_j^*\right)\,\partial_t{u_k}^*\big]\\ &=\omega\!\int\!\mathrm{d}\mathbf{x}\mathrm{d}\mathbf{j}\,\big[\left(\alpha_{jp}u_j-\beta_{jp}u_j^*\right){u_k}^*+\left(\alpha_{jp}u_j+\beta_{jp}u_j^*\right)\,u_k^*\big]\\ &=2\omega\!\int\!\mathrm{d}\mathbf{x}\mathrm{d}\mathbf{j}\,\alpha_{jp}u_ju_k^* =\int\!\mathrm{d}\mathbf{j}\,\alpha_{jp}\delta(\mathbf{j}-\mathbf{k}) =\alpha_{kp}~, \end{aligned} \ \ \ \ \ (10)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+%28%5Cbar+u_p%2Cu_k%29%26%3Di%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bx%7D%5C%2C%5Cleft%5B%5C%2C%5Cleft%28%5Cpartial_t%5Cbar+u_p%5Cright%29%7Bu_k%7D%5E%2A-%5Cbar+u_p%5C%2C%5Cpartial_t%7Bu_k%7D%5E%2A%5Cright%5D%5C%5C+%26%3Di%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bx%7D%5Cmathrm%7Bd%7D%5Cmathbf%7Bj%7D%5C%2C%5Cbig%5B%5Cleft%28%5Calpha_%7Bjp%7D%5Cpartial_t+u_j%2B%5Cbeta_%7Bjp%7D%5Cpartial_tu_j%5E%2A%5Cright%29%7Bu_k%7D%5E%2A-%5Cleft%28%5Calpha_%7Bjp%7Du_j%2B%5Cbeta_%7Bjp%7Du_j%5E%2A%5Cright%29%5C%2C%5Cpartial_t%7Bu_k%7D%5E%2A%5Cbig%5D%5C%5C+%26%3D%5Comega%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bx%7D%5Cmathrm%7Bd%7D%5Cmathbf%7Bj%7D%5C%2C%5Cbig%5B%5Cleft%28%5Calpha_%7Bjp%7Du_j-%5Cbeta_%7Bjp%7Du_j%5E%2A%5Cright%29%7Bu_k%7D%5E%2A%2B%5Cleft%28%5Calpha_%7Bjp%7Du_j%2B%5Cbeta_%7Bjp%7Du_j%5E%2A%5Cright%29%5C%2Cu_k%5E%2A%5Cbig%5D%5C%5C+%26%3D2%5Comega%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bx%7D%5Cmathrm%7Bd%7D%5Cmathbf%7Bj%7D%5C%2C%5Calpha_%7Bjp%7Du_ju_k%5E%2A+%3D%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bj%7D%5C%2C%5Calpha_%7Bjp%7D%5Cdelta%28%5Cmathbf%7Bj%7D-%5Cmathbf%7Bk%7D%29+%3D%5Calpha_%7Bkp%7D%7E%2C+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2810%29&bg=ffffff&fg=000000&s=0&c=20201002)
 . Equating the two mode expansions (1) and (3) for the same field
. Equating the two mode expansions (1) and (3) for the same field 
![\displaystyle \begin{aligned} \int\!\mathrm{d}\mathbf{k}\,\left( a_k u_k+a_k^\dagger u_k^*\right)=&\int\!\mathrm{d}\mathbf{p}\,\left( \bar a_p \bar u_p+\bar a_p^\dagger \bar u_p^*\right)\\ =&\int\!\mathrm{d}\mathbf{p}\,\mathrm{d}\mathbf{j}\,\big[\bar a_p \left(\alpha_{jp}u_j+\beta_{jp}u_j^*\right)+\bar a_p^\dagger\left(\alpha_{jp}^*u_j^*+\beta_{jp}^*u_j\right)\big]~. \end{aligned} \ \ \ \ \ (12)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bk%7D%5C%2C%5Cleft%28+a_k+u_k%2Ba_k%5E%5Cdagger+u_k%5E%2A%5Cright%29%3D%26%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bp%7D%5C%2C%5Cleft%28+%5Cbar+a_p+%5Cbar+u_p%2B%5Cbar+a_p%5E%5Cdagger+%5Cbar+u_p%5E%2A%5Cright%29%5C%5C+%3D%26%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bp%7D%5C%2C%5Cmathrm%7Bd%7D%5Cmathbf%7Bj%7D%5C%2C%5Cbig%5B%5Cbar+a_p+%5Cleft%28%5Calpha_%7Bjp%7Du_j%2B%5Cbeta_%7Bjp%7Du_j%5E%2A%5Cright%29%2B%5Cbar+a_p%5E%5Cdagger%5Cleft%28%5Calpha_%7Bjp%7D%5E%2Au_j%5E%2A%2B%5Cbeta_%7Bjp%7D%5E%2Au_j%5Cright%29%5Cbig%5D%7E.+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2812%29&bg=ffffff&fg=000000&s=0&c=20201002)
 (recall this is how we isolate the coefficients, cf. (6)), and using the fact that the modes are orthonormal (7), we then have
(recall this is how we isolate the coefficients, cf. (6)), and using the fact that the modes are orthonormal (7), we then have
 , we’d simply have obtained
, we’d simply have obtained  , we repeat this process, instead rewriting the left-hand side of (12) in terms of
, we repeat this process, instead rewriting the left-hand side of (12) in terms of  . Importantly, one can see immediately from (11) that these two quantizations, (1) and (3), lead to different Fock spaces (i.e., different vacuum states) unless
. Importantly, one can see immediately from (11) that these two quantizations, (1) and (3), lead to different Fock spaces (i.e., different vacuum states) unless  . Said differently,
. Said differently,  implies that the alternative quantization
implies that the alternative quantization  does not imply
does not imply  , so the latter quantization will detect particles when the former does not! In some sense, this is just the same spirit of relativity (i.e., no privileged reference frames) carried over to QFT, but it’s a radical conclusion nonetheless.
, so the latter quantization will detect particles when the former does not! In some sense, this is just the same spirit of relativity (i.e., no privileged reference frames) carried over to QFT, but it’s a radical conclusion nonetheless. to
to  :
:

 is some constant that parametrizes the acceleration. Note however that these coordinates cover only a single quadrant of Minkowski space, namely the wedge
is some constant that parametrizes the acceleration. Note however that these coordinates cover only a single quadrant of Minkowski space, namely the wedge  . The line
. The line  is the Rindler horizon, the physics of which well-approximates the near-horizon geometry of a black hole (when the curvature and radial directions can be ignored). This last fact underlies the central importance of Rindler space in the study of black holes, and QFT in curved space in general, as it captures many of the key features of horizons (e.g., their thermodynamic properties). Rindler time-slices — that is, lines of constant
is the Rindler horizon, the physics of which well-approximates the near-horizon geometry of a black hole (when the curvature and radial directions can be ignored). This last fact underlies the central importance of Rindler space in the study of black holes, and QFT in curved space in general, as it captures many of the key features of horizons (e.g., their thermodynamic properties). Rindler time-slices — that is, lines of constant  — are straight,
— are straight,  , while lines of constant
, while lines of constant  . The proper acceleration is given by
. The proper acceleration is given by  , so that the closer one gets to the horizon, the harder one has to accelerate (note again the analogy with black holes here). These hyperbolae asymptote to the null rays
, so that the closer one gets to the horizon, the harder one has to accelerate (note again the analogy with black holes here). These hyperbolae asymptote to the null rays  , so that the accelerated observer approaches the speed of light in the limit
, so that the accelerated observer approaches the speed of light in the limit  ; see the image below (I found this online, so don’t let the different labels confuse you):
; see the image below (I found this online, so don’t let the different labels confuse you):
 . This requires expressing the Rindler creation/annihilation operators in terms of their Minkowski counterparts, in order to figure out how they act on this state.
. This requires expressing the Rindler creation/annihilation operators in terms of their Minkowski counterparts, in order to figure out how they act on this state.
 in the wedge under consideration. Since we’re working with massless fields, these coordinates have the significant advantage of not mixing positive and negative frequencies. That is, observe that in these coordinates, the Minkowski and Rindler metrics become, respectively,
in the wedge under consideration. Since we’re working with massless fields, these coordinates have the significant advantage of not mixing positive and negative frequencies. That is, observe that in these coordinates, the Minkowski and Rindler metrics become, respectively,


 , and then in the last line changed integration variables
, and then in the last line changed integration variables  in the second term in order to combine the integrals. In lightcone coordinates (16), this becomes
in the second term in order to combine the integrals. In lightcone coordinates (16), this becomes
 via the rescaling
via the rescaling  . Observe how the final expression naturally decomposes into creation/annihilation operators for left- and right-movers. And since the Rindler metric is conformally flat, it admits a formally identical expression within the wedge
. Observe how the final expression naturally decomposes into creation/annihilation operators for left- and right-movers. And since the Rindler metric is conformally flat, it admits a formally identical expression within the wedge  :
:
 is the rescaled Rindler momentum, and
is the rescaled Rindler momentum, and  . Now comes the chief advantage of this approach mentioned above: since the notion of positive/negative momenta is preserved under the conformal transformation from Minkowski to Rindler space, we can directly identify
. Now comes the chief advantage of this approach mentioned above: since the notion of positive/negative momenta is preserved under the conformal transformation from Minkowski to Rindler space, we can directly identify
 in terms of the Minkowski operators
in terms of the Minkowski operators  , so that we can compute the expectation value of the number operator,
, so that we can compute the expectation value of the number operator,  . To that end, we first isolate the right-moving annihilation mode
. To that end, we first isolate the right-moving annihilation mode  by an appropriate Fourier transform of the first of these equations:
by an appropriate Fourier transform of the first of these equations:![\displaystyle \begin{aligned} \int_{-\infty}^{\infty}\!\mathrm{d}\bar x_-\!&\int_0^\infty\!\frac{\mathrm{d}\mathbf{p}}{4\pi\mathbf{p}}\left( a_pe^{i\mathbf{p} x_--i\mathbf{q}'\bar x_-}+a_p^\dagger e^{-i\mathbf{p} x_--i\mathbf{q}'\bar x_-}\right)\\ &=\int_{-\infty}^\infty\!\mathrm{d}\bar x_-\!\int_0^\infty\!\frac{\mathrm{d}\mathbf{q}}{4\pi\mathbf{q}}\left( b_qe^{i(\mathbf{q}-\mathbf{q}')\bar x_-}+b_q^\dagger e^{-i(\mathbf{q}+\mathbf{q}') \bar x_-}\right)~,\\ &=\int_0^\infty\!\frac{\mathrm{d}\mathbf{q}}{2\mathbf{q}}\left[ b_q\,\delta(\mathbf{q}-\mathbf{q}')+b_q^\dagger\,\delta(\mathbf{q}+\mathbf{q}')\right] =\frac{1}{2\mathbf{q}'}\times\begin{cases} b_{q'}\quad&\mathbf{q}'>0~,\\ b_{-q'}^\dagger\quad&\mathbf{q}'<0~, \end{cases}~, \end{aligned} \ \ \ \ \ (23)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+%5Cint_%7B-%5Cinfty%7D%5E%7B%5Cinfty%7D%5C%21%5Cmathrm%7Bd%7D%5Cbar+x_-%5C%21%26%5Cint_0%5E%5Cinfty%5C%21%5Cfrac%7B%5Cmathrm%7Bd%7D%5Cmathbf%7Bp%7D%7D%7B4%5Cpi%5Cmathbf%7Bp%7D%7D%5Cleft%28+a_pe%5E%7Bi%5Cmathbf%7Bp%7D+x_--i%5Cmathbf%7Bq%7D%27%5Cbar+x_-%7D%2Ba_p%5E%5Cdagger+e%5E%7B-i%5Cmathbf%7Bp%7D+x_--i%5Cmathbf%7Bq%7D%27%5Cbar+x_-%7D%5Cright%29%5C%5C+%26%3D%5Cint_%7B-%5Cinfty%7D%5E%5Cinfty%5C%21%5Cmathrm%7Bd%7D%5Cbar+x_-%5C%21%5Cint_0%5E%5Cinfty%5C%21%5Cfrac%7B%5Cmathrm%7Bd%7D%5Cmathbf%7Bq%7D%7D%7B4%5Cpi%5Cmathbf%7Bq%7D%7D%5Cleft%28+b_qe%5E%7Bi%28%5Cmathbf%7Bq%7D-%5Cmathbf%7Bq%7D%27%29%5Cbar+x_-%7D%2Bb_q%5E%5Cdagger+e%5E%7B-i%28%5Cmathbf%7Bq%7D%2B%5Cmathbf%7Bq%7D%27%29+%5Cbar+x_-%7D%5Cright%29%7E%2C%5C%5C+%26%3D%5Cint_0%5E%5Cinfty%5C%21%5Cfrac%7B%5Cmathrm%7Bd%7D%5Cmathbf%7Bq%7D%7D%7B2%5Cmathbf%7Bq%7D%7D%5Cleft%5B+b_q%5C%2C%5Cdelta%28%5Cmathbf%7Bq%7D-%5Cmathbf%7Bq%7D%27%29%2Bb_q%5E%5Cdagger%5C%2C%5Cdelta%28%5Cmathbf%7Bq%7D%2B%5Cmathbf%7Bq%7D%27%29%5Cright%5D+%3D%5Cfrac%7B1%7D%7B2%5Cmathbf%7Bq%7D%27%7D%5Ctimes%5Cbegin%7Bcases%7D+b_%7Bq%27%7D%5Cquad%26%5Cmathbf%7Bq%7D%27%3E0%7E%2C%5C%5C+b_%7B-q%27%7D%5E%5Cdagger%5Cquad%26%5Cmathbf%7Bq%7D%27%3C0%7E%2C+%5Cend%7Bcases%7D%7E%2C+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2823%29&bg=ffffff&fg=000000&s=0&c=20201002)
 in the Fourier transform to take any sign. Recalling however that the expressions (22) were derived for positive momenta, we must have
in the Fourier transform to take any sign. Recalling however that the expressions (22) were derived for positive momenta, we must have![\displaystyle b_{q}=\int_0^\infty\!\frac{\mathrm{d}\mathbf{p}}{2\pi}\frac{\mathbf{q}}{\mathbf{p}}\left[ a_p\,F(\mathbf{p},\mathbf{q})+a_p^\dagger\,F(-\mathbf{p},\mathbf{q})\right]~, \ \ \ \ \ (24)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+b_%7Bq%7D%3D%5Cint_0%5E%5Cinfty%5C%21%5Cfrac%7B%5Cmathrm%7Bd%7D%5Cmathbf%7Bp%7D%7D%7B2%5Cpi%7D%5Cfrac%7B%5Cmathbf%7Bq%7D%7D%7B%5Cmathbf%7Bp%7D%7D%5Cleft%5B+a_p%5C%2CF%28%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%29%2Ba_p%5E%5Cdagger%5C%2CF%28-%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%29%5Cright%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2824%29&bg=ffffff&fg=000000&s=0&c=20201002)

 by simply taking the hermitian conjugate of this expression, noting that by definition,
by simply taking the hermitian conjugate of this expression, noting that by definition,
![\displaystyle b_{-q}^\dagger=\int_0^\infty\!\frac{\mathrm{d}\mathbf{p}}{2\pi}\frac{\mathbf{q}}{\mathbf{p}}\left[ a_{-p}\,F(-\mathbf{p},\mathbf{q})+a_{-p}^\dagger\,F(\mathbf{p},\mathbf{q})\right]~, \ \ \ \ \ (27)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+b_%7B-q%7D%5E%5Cdagger%3D%5Cint_0%5E%5Cinfty%5C%21%5Cfrac%7B%5Cmathrm%7Bd%7D%5Cmathbf%7Bp%7D%7D%7B2%5Cpi%7D%5Cfrac%7B%5Cmathbf%7Bq%7D%7D%7B%5Cmathbf%7Bp%7D%7D%5Cleft%5B+a_%7B-p%7D%5C%2CF%28-%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%29%2Ba_%7B-p%7D%5E%5Cdagger%5C%2CF%28%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%29%5Cright%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2827%29&bg=ffffff&fg=000000&s=0&c=20201002)
 .
. in the Minkowski vacuum, to determine what a uniformly accelerating observer would observe. For compactness, we shall denote
in the Minkowski vacuum, to determine what a uniformly accelerating observer would observe. For compactness, we shall denote  in the following computation:
in the following computation: 
 is to explicitly work out
is to explicitly work out  , but the latter requires a contour integral, and one is left with an integral over a product of complex Gamma functions for the former (I’ve included this at the end of this post, for the masochistic among you). A more clever alternative, taking a tip from [2], is to use the normalization condition on the Bogolyubov coefficients one obtains from the canonical commutation relations:
, but the latter requires a contour integral, and one is left with an integral over a product of complex Gamma functions for the former (I’ve included this at the end of this post, for the masochistic among you). A more clever alternative, taking a tip from [2], is to use the normalization condition on the Bogolyubov coefficients one obtains from the canonical commutation relations:![\displaystyle \begin{aligned} {}[b_q,b_{q'}^\dagger]&=\int\!\mathrm{d}\mathbf{p}\,\mathrm{d}\mathbf{p}'\left(\alpha_{pq}^*\alpha_{p'q'}-\beta_{p'q'}^*\beta_{pq}\right) [a_p,a_{p'}^\dagger]\\ &=\int\!\mathrm{d}\mathbf{p}\,4\pi|\mathbf{p}|\left(\alpha_{pq}^*\alpha_{pq'}-\beta_{pq'}^*\beta_{pq}\right)\\ &=\int\!\frac{\mathrm{d}\mathbf{p}}{\pi}\frac{\mathbf{q}\mathbf{q}'}{|\mathbf{p}|}\left[F(\mathbf{p},\mathbf{q})F^*(\mathbf{p},\mathbf{q}')-F(-\mathbf{p},\mathbf{q})F^*(-\mathbf{p},\mathbf{q}')\right]\\ &=\int\!\frac{\mathrm{d}\mathbf{p}}{\pi}\frac{\mathbf{q}\mathbf{q}'}{|\mathbf{p}|}\left[\left( e^{\pi \mathbf{q}/\sqrt{2}a}+e^{\pi \mathbf{q}'/\sqrt{2}a}\right)-1\right]F(-\mathbf{p},\mathbf{q})F^*(-\mathbf{p},\mathbf{q}') \\ \end{aligned} \ \ \ \ \ (29)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+%7B%7D%5Bb_q%2Cb_%7Bq%27%7D%5E%5Cdagger%5D%26%3D%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bp%7D%5C%2C%5Cmathrm%7Bd%7D%5Cmathbf%7Bp%7D%27%5Cleft%28%5Calpha_%7Bpq%7D%5E%2A%5Calpha_%7Bp%27q%27%7D-%5Cbeta_%7Bp%27q%27%7D%5E%2A%5Cbeta_%7Bpq%7D%5Cright%29+%5Ba_p%2Ca_%7Bp%27%7D%5E%5Cdagger%5D%5C%5C+%26%3D%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bp%7D%5C%2C4%5Cpi%7C%5Cmathbf%7Bp%7D%7C%5Cleft%28%5Calpha_%7Bpq%7D%5E%2A%5Calpha_%7Bpq%27%7D-%5Cbeta_%7Bpq%27%7D%5E%2A%5Cbeta_%7Bpq%7D%5Cright%29%5C%5C+%26%3D%5Cint%5C%21%5Cfrac%7B%5Cmathrm%7Bd%7D%5Cmathbf%7Bp%7D%7D%7B%5Cpi%7D%5Cfrac%7B%5Cmathbf%7Bq%7D%5Cmathbf%7Bq%7D%27%7D%7B%7C%5Cmathbf%7Bp%7D%7C%7D%5Cleft%5BF%28%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%29F%5E%2A%28%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%27%29-F%28-%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%29F%5E%2A%28-%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%27%29%5Cright%5D%5C%5C+%26%3D%5Cint%5C%21%5Cfrac%7B%5Cmathrm%7Bd%7D%5Cmathbf%7Bp%7D%7D%7B%5Cpi%7D%5Cfrac%7B%5Cmathbf%7Bq%7D%5Cmathbf%7Bq%7D%27%7D%7B%7C%5Cmathbf%7Bp%7D%7C%7D%5Cleft%5B%5Cleft%28+e%5E%7B%5Cpi+%5Cmathbf%7Bq%7D%2F%5Csqrt%7B2%7Da%7D%2Be%5E%7B%5Cpi+%5Cmathbf%7Bq%7D%27%2F%5Csqrt%7B2%7Da%7D%5Cright%29-1%5Cright%5DF%28-%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%29F%5E%2A%28-%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%27%29+%5C%5C+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2829%29&bg=ffffff&fg=000000&s=0&c=20201002)
 (exercise for the reader, or see the appendix below). Since the left-hand side is equal to
(exercise for the reader, or see the appendix below). Since the left-hand side is equal to  , we must have
, we must have![\displaystyle \int\!\frac{\mathrm{d}\mathbf{p}}{(2\pi)^2}\frac{\mathbf{q}'}{|\mathbf{p}|}\left[\left( e^{\pi \mathbf{q}/\sqrt{2}a}+e^{\pi \mathbf{q}'/\sqrt{2}a}\right)-1\right]F(-\mathbf{p},\mathbf{q})F^*(-\mathbf{p},\mathbf{q}')=\delta(\mathbf{q}-\mathbf{q}')~, \ \ \ \ \ (30)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cint%5C%21%5Cfrac%7B%5Cmathrm%7Bd%7D%5Cmathbf%7Bp%7D%7D%7B%282%5Cpi%29%5E2%7D%5Cfrac%7B%5Cmathbf%7Bq%7D%27%7D%7B%7C%5Cmathbf%7Bp%7D%7C%7D%5Cleft%5B%5Cleft%28+e%5E%7B%5Cpi+%5Cmathbf%7Bq%7D%2F%5Csqrt%7B2%7Da%7D%2Be%5E%7B%5Cpi+%5Cmathbf%7Bq%7D%27%2F%5Csqrt%7B2%7Da%7D%5Cright%29-1%5Cright%5DF%28-%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%29F%5E%2A%28-%5Cmathbf%7Bp%7D%2C%5Cmathbf%7Bq%7D%27%29%3D%5Cdelta%28%5Cmathbf%7Bq%7D-%5Cmathbf%7Bq%7D%27%29%7E%2C+%5C+%5C+%5C+%5C+%5C+%2830%29&bg=ffffff&fg=000000&s=0&c=20201002)
 , we obtain
, we obtain

 (that is, here
(that is, here  plays the role of the original Rindler momentum in (3). Note that the integration measure doesn’t pick up a factor of
plays the role of the original Rindler momentum in (3). Note that the integration measure doesn’t pick up a factor of  , and a UV divergence due to the fact that we integrated over arbitrarily high momenta. The first is rather silly, and arises from the infinite spatial volume
, and a UV divergence due to the fact that we integrated over arbitrarily high momenta. The first is rather silly, and arises from the infinite spatial volume  :
:
 , where
, where  . Hence, stripping off the divergences in this manner, we arrive at
. Hence, stripping off the divergences in this manner, we arrive at
 .
.
 ), relativity (
), relativity ( ), and quantum field theory (
), and quantum field theory ( ). It is another manifestation of the thermal nature of horizons we mentioned in
). It is another manifestation of the thermal nature of horizons we mentioned in  , the only additional ingredient in this exceptional confluence is the presence of gravity (
, the only additional ingredient in this exceptional confluence is the presence of gravity ( )—the nature of which we’re far from having grasped.
)—the nature of which we’re far from having grasped.
 and
and  are the upper and lower incomplete gamma functions, respectively, and
are the upper and lower incomplete gamma functions, respectively, and  with
with  . We then begin by defining a new variable
. We then begin by defining a new variable  , so that
, so that
 ,
,  (and broken the boldface convention, because I didn’t want to introduce even more letters). This is pretty close to the desired form already, but the complex exponent
(and broken the boldface convention, because I didn’t want to introduce even more letters). This is pretty close to the desired form already, but the complex exponent  necessitates that we promote
necessitates that we promote  to a complex variable, and treat this as a contour integral in the complex plane.
to a complex variable, and treat this as a contour integral in the complex plane. in the form
in the form  with
with  , which has branch points at both
, which has branch points at both  and
and  , since there’s a non-trivial monodromy
, since there’s a non-trivial monodromy  along a closed path that encircles either point in the complex plane. Since the integral converges as
along a closed path that encircles either point in the complex plane. Since the integral converges as  due to the exponential damping, let’s choose the branch cut to run from
due to the exponential damping, let’s choose the branch cut to run from  along the negative real axis, so that the following contour encloses no poles:
along the negative real axis, so that the following contour encloses no poles:
 , which vanishes since
, which vanishes since  . Thus, taking
. Thus, taking  along the positive complex axis, the integral (37) becomes
along the positive complex axis, the integral (37) becomes
 . Comparing with the form of the gamma function (36), we identify
. Comparing with the form of the gamma function (36), we identify  and
and  , whence we find
, whence we find



 are similarly obtained from (27).
are similarly obtained from (27). , where the
, where the  -vector
-vector  , with Greek indices running over the full
, with Greek indices running over the full  -dimensional spatial component. While I’m at it, I should also warn you that [1] uses the exceedingly unpalatable mostly-minus convention
-dimensional spatial component. While I’m at it, I should also warn you that [1] uses the exceedingly unpalatable mostly-minus convention  , whereas I’m going to use mostly-plus
, whereas I’m going to use mostly-plus  . The former seems to be preferred by particle physicists, because they share with small children a preference for timelike 4-vectors to have positive magnitude. But the latter is generally preferred by relativists and most workers in high-energy theory and quantum gravity, because 3-vectors have no minus signs (i.e., it’s consistent with the non-relativistic case, whereas mostly-plus yields a negative-definite metric), raising and lowering indices involves flipping only a single sign (arguably the most important for our purposes, since we’ll be Wick rotating between Lorentzian and Euclidean signature; mostly-plus would again lead to a negative-definite Euclidean metric), and the extension to general dimensions contains only a single
. The former seems to be preferred by particle physicists, because they share with small children a preference for timelike 4-vectors to have positive magnitude. But the latter is generally preferred by relativists and most workers in high-energy theory and quantum gravity, because 3-vectors have no minus signs (i.e., it’s consistent with the non-relativistic case, whereas mostly-plus yields a negative-definite metric), raising and lowering indices involves flipping only a single sign (arguably the most important for our purposes, since we’ll be Wick rotating between Lorentzian and Euclidean signature; mostly-plus would again lead to a negative-definite Euclidean metric), and the extension to general dimensions contains only a single  in the determinant (as opposed to a factor of
in the determinant (as opposed to a factor of  in mostly-minus).
in mostly-minus).
 is the Minkowski metric (no curved space just yet). By applying the variational principle
is the Minkowski metric (no curved space just yet). By applying the variational principle  to the action
to the action

 . The general solution, upon imposing that
. The general solution, upon imposing that ![\displaystyle \phi(x)=\int\!\frac{\mathrm{d}^dk}{2\omega(2\pi)^d}\left[a_k e^{i\mathbf{k}\mathbf{x}-i\omega t}+a_k^\dagger e^{-i\mathbf{k}\mathbf{x}+i\omega t}\right]~, \ \ \ \ \ (4)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cphi%28x%29%3D%5Cint%5C%21%5Cfrac%7B%5Cmathrm%7Bd%7D%5Edk%7D%7B2%5Comega%282%5Cpi%29%5Ed%7D%5Cleft%5Ba_k+e%5E%7Bi%5Cmathbf%7Bk%7D%5Cmathbf%7Bx%7D-i%5Comega+t%7D%2Ba_k%5E%5Cdagger+e%5E%7B-i%5Cmathbf%7Bk%7D%5Cmathbf%7Bx%7D%2Bi%5Comega+t%7D%5Cright%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%284%29&bg=ffffff&fg=000000&s=0&c=20201002)
 is the annihilation operator that kills the vacuum state, i.e.,
is the annihilation operator that kills the vacuum state, i.e.,  (so
(so  , which affects a number of later formulas, and can cause confusion when comparing different sources. The convention I’m using is physically well-motivated in that it makes the measure Lorentz invariant while encoding the on-shell condition
, which affects a number of later formulas, and can cause confusion when comparing different sources. The convention I’m using is physically well-motivated in that it makes the measure Lorentz invariant while encoding the on-shell condition  . That is, the Lorentz invariant measure in the full
. That is, the Lorentz invariant measure in the full  . If we then impose the on-shell condition along with
. If we then impose the on-shell condition along with  (in the form of the Heaviside function
(in the form of the Heaviside function  ), we have
), we have
 has a root at
has a root at  , then we may write
, then we may write
 . In the present case,
. In the present case,  , and
, and  (note that the Heaviside function will select the positive root). Thus
(note that the Heaviside function will select the positive root). Thus
 and
and  . Mathematicians seem to prefer splitting this so that both
. Mathematicians seem to prefer splitting this so that both  and
and  get a factor of
get a factor of  , but physicists favour simply attaching it all to the momentum, so that
, but physicists favour simply attaching it all to the momentum, so that

 (or vice versa):
(or vice versa):

 and the like for failure to invest this time at the start).
and the like for failure to invest this time at the start). from the two-point correlator
from the two-point correlator  , including the familiar Feynman propagator. Following [1], we’ll denote the expectation values of the commutator and anticommutator as follows:
, including the familiar Feynman propagator. Following [1], we’ll denote the expectation values of the commutator and anticommutator as follows: ![\displaystyle \begin{aligned} iG(x,x')&=\langle\left[\phi(x),\phi(x')\right]\rangle=G^+\!(x,x')-G^-\!(x,x')~,\\ G^{(1)}(x,x')&=\langle\left\{\phi(x),\phi(x')\right\}\rangle=G^+\!(x,x')+G^-\!(x,x')~, \end{aligned} \ \ \ \ \ (12)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+iG%28x%2Cx%27%29%26%3D%5Clangle%5Cleft%5B%5Cphi%28x%29%2C%5Cphi%28x%27%29%5Cright%5D%5Crangle%3DG%5E%2B%5C%21%28x%2Cx%27%29-G%5E-%5C%21%28x%2Cx%27%29%7E%2C%5C%5C+G%5E%7B%281%29%7D%28x%2Cx%27%29%26%3D%5Clangle%5Cleft%5C%7B%5Cphi%28x%29%2C%5Cphi%28x%27%29%5Cright%5C%7D%5Crangle%3DG%5E%2B%5C%21%28x%2Cx%27%29%2BG%5E-%5C%21%28x%2Cx%27%29%7E%2C+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2812%29&bg=ffffff&fg=000000&s=0&c=20201002)
 on the far right-hand sides are the so-called positive/negative frequency Wightman functions,
on the far right-hand sides are the so-called positive/negative frequency Wightman functions,

 acts only on
acts only on  ), it reduces to the Klein-Gordon equation above for the Wightman functions, from which the others follow.
), it reduces to the Klein-Gordon equation above for the Wightman functions, from which the others follow.
 ) Feynman propagator, and
) Feynman propagator, and

 , we have
, we have![\displaystyle \begin{aligned} \square_x G_F=&-i\eta^{\mu0}\partial_\mu\left[\delta(t-t')G^+\!(x,x')-\delta(t'-t)G^-\!(x,x')\right]\\ &-i\eta^{\mu\nu}\partial_\mu\left[\Theta(t-t')\partial_\nu G^+\!(x,x')+\Theta(t'-t)\partial_\nu G^-\!(x,x')\right]~. \end{aligned} \ \ \ \ \ (18)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+%5Csquare_x+G_F%3D%26-i%5Ceta%5E%7B%5Cmu0%7D%5Cpartial_%5Cmu%5Cleft%5B%5Cdelta%28t-t%27%29G%5E%2B%5C%21%28x%2Cx%27%29-%5Cdelta%28t%27-t%29G%5E-%5C%21%28x%2Cx%27%29%5Cright%5D%5C%5C+%26-i%5Ceta%5E%7B%5Cmu%5Cnu%7D%5Cpartial_%5Cmu%5Cleft%5B%5CTheta%28t-t%27%29%5Cpartial_%5Cnu+G%5E%2B%5C%21%28x%2Cx%27%29%2B%5CTheta%28t%27-t%29%5Cpartial_%5Cnu+G%5E-%5C%21%28x%2Cx%27%29%5Cright%5D%7E.+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2818%29&bg=ffffff&fg=000000&s=0&c=20201002)
![{{[\phi(t,\mathbf{x}),\phi(t,\mathbf{x}')]=0}}](https://s0.wp.com/latex.php?latex=%7B%7B%5B%5Cphi%28t%2C%5Cmathbf%7Bx%7D%29%2C%5Cphi%28t%2C%5Cmathbf%7Bx%7D%27%29%5D%3D0%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) means that in the first line,
means that in the first line,  . And since the delta function itself is even, this implies that the first two terms cancel, so we continue with just the second line:
. And since the delta function itself is even, this implies that the first two terms cancel, so we continue with just the second line:![\displaystyle \begin{aligned} \square_x G_F=&-i\eta^{00}\left[\delta(t-t')\partial_0 G^+\!(x,x')-\delta(t'-t)\partial_0 G^-\!(x,x')\right]\\ &-i\eta^{\mu\nu}\left[\Theta(t-t')\partial_\mu\partial_\nu G^+\!(x,x')+\Theta(t'-t)\partial_\mu\partial_\nu G^-\!(x,x')\right]\\ =&\,\,i\delta(t-t')\left[\pi(x)\phi(x')-\phi(x')\pi(x)\right]\\ &-i\left[\Theta(t-t')\square_x G^+\!(x,x')+\Theta(t'-t)\square_x G^-\!(x,x')\right]~, \end{aligned} \ \ \ \ \ (19)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+%5Csquare_x+G_F%3D%26-i%5Ceta%5E%7B00%7D%5Cleft%5B%5Cdelta%28t-t%27%29%5Cpartial_0+G%5E%2B%5C%21%28x%2Cx%27%29-%5Cdelta%28t%27-t%29%5Cpartial_0+G%5E-%5C%21%28x%2Cx%27%29%5Cright%5D%5C%5C+%26-i%5Ceta%5E%7B%5Cmu%5Cnu%7D%5Cleft%5B%5CTheta%28t-t%27%29%5Cpartial_%5Cmu%5Cpartial_%5Cnu+G%5E%2B%5C%21%28x%2Cx%27%29%2B%5CTheta%28t%27-t%29%5Cpartial_%5Cmu%5Cpartial_%5Cnu+G%5E-%5C%21%28x%2Cx%27%29%5Cright%5D%5C%5C+%3D%26%5C%2C%5C%2Ci%5Cdelta%28t-t%27%29%5Cleft%5B%5Cpi%28x%29%5Cphi%28x%27%29-%5Cphi%28x%27%29%5Cpi%28x%29%5Cright%5D%5C%5C+%26-i%5Cleft%5B%5CTheta%28t-t%27%29%5Csquare_x+G%5E%2B%5C%21%28x%2Cx%27%29%2B%5CTheta%28t%27-t%29%5Csquare_x+G%5E-%5C%21%28x%2Cx%27%29%5Cright%5D%7E%2C+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2819%29&bg=ffffff&fg=000000&s=0&c=20201002)
 . Then by (14), the second line will vanish for all values of
. Then by (14), the second line will vanish for all values of  when we add in the
when we add in the  term of the wave operator, and the first line is just (minus) the equal-time commutator
term of the wave operator, and the first line is just (minus) the equal-time commutator ![{[\phi(t,\mathbf{x}),\pi(t,\mathbf{x}')]=i\delta^d(\mathbf{x}-\mathbf{x}')}](https://s0.wp.com/latex.php?latex=%7B%5B%5Cphi%28t%2C%5Cmathbf%7Bx%7D%29%2C%5Cpi%28t%2C%5Cmathbf%7Bx%7D%27%29%5D%3Di%5Cdelta%5Ed%28%5Cmathbf%7Bx%7D-%5Cmathbf%7Bx%7D%27%29%7D&bg=ffffff&fg=000000&s=0&c=20201002) . Hence
. Hence
 ; similarly for
; similarly for  and
and  .
. “propagators” is that, unlike the kernels
“propagators” is that, unlike the kernels  , they represent the transition amplitude for a particle (virtual or otherwise) propagating from
, they represent the transition amplitude for a particle (virtual or otherwise) propagating from  , subject to appropriate boundary conditions. To see this, consider the integral representation
, subject to appropriate boundary conditions. To see this, consider the integral representation 
 . Due to the poles at
. Due to the poles at  , we need to choose a suitable contour for the integral to be well-defined (analytically continuing to
, we need to choose a suitable contour for the integral to be well-defined (analytically continuing to  ). The particular choice of contour determines which of the kernels
). The particular choice of contour determines which of the kernels 
 , we may absorb the sign into the integration variable, and identify
, we may absorb the sign into the integration variable, and identify
 :
:
 prescription, i.e., which of the poles we want to enclose with the choice of contour. Consider first the retarded propagator
prescription, i.e., which of the poles we want to enclose with the choice of contour. Consider first the retarded propagator  (where
(where  ). Conversely, when
). Conversely, when  , we must close the contour in the negative half-plane so that
, we must close the contour in the negative half-plane so that  , and the integral converges. Thus we should introduce factors of
, and the integral converges. Thus we should introduce factors of  , and then take
, and then take  :
: ![\displaystyle \begin{aligned} G_R(x,x')&=\int\frac{\mathrm{d}^dk}{(2\pi)^D}e^{i\mathbf{k}(\mathbf{x}-\mathbf{x}')}\oint\mathrm{d} k_0\frac{e^{-ik_0(x_0-x'_0)}}{-2k_0}\left(\frac{1}{k_0-\sqrt{\mathbf{k}^2+m^2}+i\epsilon}+\frac{1}{k_0+\sqrt{\mathbf{k}^2+m^2}+i\epsilon}\right)\\ &=\Theta(x_0-x'_0)\int\frac{\mathrm{d}^dk}{(2\pi)^D}e^{i\mathbf{k}(\mathbf{x}-\mathbf{x}')}(2\pi i)\left(\frac{e^{-i\omega(x_0-x'_0)}}{-2\omega}+\frac{e^{i\omega(x_0-x'_0)}}{2\omega}\right)\\ &=-i\Theta(x_0-x'_0)\int\frac{\mathrm{d}^dk}{2\omega(2\pi)^d}e^{i\mathbf{k}(\mathbf{x}-\mathbf{x}')}\left( e^{-i\omega(x_0-x'_0)}-e^{i\omega(x_0-x'_0)}\right)\\ &=-i\Theta(x_0-x'_0)\int\frac{\mathrm{d}^dk}{2\omega(2\pi)^d}\left[e^{ik(x-x')}-e^{-ik(x-x')}\right]\\ &=i\Theta(x_0-x'_0)\langle\left[\phi(x),\phi(x')\right]\rangle =-\Theta(t-t')G(x,x')~, \end{aligned} \ \ \ \ \ (24)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+G_R%28x%2Cx%27%29%26%3D%5Cint%5Cfrac%7B%5Cmathrm%7Bd%7D%5Edk%7D%7B%282%5Cpi%29%5ED%7De%5E%7Bi%5Cmathbf%7Bk%7D%28%5Cmathbf%7Bx%7D-%5Cmathbf%7Bx%7D%27%29%7D%5Coint%5Cmathrm%7Bd%7D+k_0%5Cfrac%7Be%5E%7B-ik_0%28x_0-x%27_0%29%7D%7D%7B-2k_0%7D%5Cleft%28%5Cfrac%7B1%7D%7Bk_0-%5Csqrt%7B%5Cmathbf%7Bk%7D%5E2%2Bm%5E2%7D%2Bi%5Cepsilon%7D%2B%5Cfrac%7B1%7D%7Bk_0%2B%5Csqrt%7B%5Cmathbf%7Bk%7D%5E2%2Bm%5E2%7D%2Bi%5Cepsilon%7D%5Cright%29%5C%5C+%26%3D%5CTheta%28x_0-x%27_0%29%5Cint%5Cfrac%7B%5Cmathrm%7Bd%7D%5Edk%7D%7B%282%5Cpi%29%5ED%7De%5E%7Bi%5Cmathbf%7Bk%7D%28%5Cmathbf%7Bx%7D-%5Cmathbf%7Bx%7D%27%29%7D%282%5Cpi+i%29%5Cleft%28%5Cfrac%7Be%5E%7B-i%5Comega%28x_0-x%27_0%29%7D%7D%7B-2%5Comega%7D%2B%5Cfrac%7Be%5E%7Bi%5Comega%28x_0-x%27_0%29%7D%7D%7B2%5Comega%7D%5Cright%29%5C%5C+%26%3D-i%5CTheta%28x_0-x%27_0%29%5Cint%5Cfrac%7B%5Cmathrm%7Bd%7D%5Edk%7D%7B2%5Comega%282%5Cpi%29%5Ed%7De%5E%7Bi%5Cmathbf%7Bk%7D%28%5Cmathbf%7Bx%7D-%5Cmathbf%7Bx%7D%27%29%7D%5Cleft%28+e%5E%7B-i%5Comega%28x_0-x%27_0%29%7D-e%5E%7Bi%5Comega%28x_0-x%27_0%29%7D%5Cright%29%5C%5C+%26%3D-i%5CTheta%28x_0-x%27_0%29%5Cint%5Cfrac%7B%5Cmathrm%7Bd%7D%5Edk%7D%7B2%5Comega%282%5Cpi%29%5Ed%7D%5Cleft%5Be%5E%7Bik%28x-x%27%29%7D-e%5E%7B-ik%28x-x%27%29%7D%5Cright%5D%5C%5C+%26%3Di%5CTheta%28x_0-x%27_0%29%5Clangle%5Cleft%5B%5Cphi%28x%29%2C%5Cphi%28x%27%29%5Cright%5D%5Crangle+%3D-%5CTheta%28t-t%27%29G%28x%2Cx%27%29%7E%2C+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2824%29&bg=ffffff&fg=000000&s=0&c=20201002)
![{[a_k,a_k'^\dagger]=2\omega(2\pi)^d\delta^d(\mathbf{k}-\mathbf{k}')}](https://s0.wp.com/latex.php?latex=%7B%5Ba_k%2Ca_k%27%5E%5Cdagger%5D%3D2%5Comega%282%5Cpi%29%5Ed%5Cdelta%5Ed%28%5Cmathbf%7Bk%7D-%5Cmathbf%7Bk%7D%27%29%7D&bg=ffffff&fg=000000&s=0&c=20201002) . Note that to yield the correct signs, we’ve chosen the contour to run counter-clockwise (note the factor of
. Note that to yield the correct signs, we’ve chosen the contour to run counter-clockwise (note the factor of  ), which means that it runs from
), which means that it runs from  to
to  along the real axis. The prescription for the advanced propagator is precisely similar, except we deform both poles in the positive complex direction (so that the integral vanishes when we close the contour below, as required for
along the real axis. The prescription for the advanced propagator is precisely similar, except we deform both poles in the positive complex direction (so that the integral vanishes when we close the contour below, as required for  ), and the non-vanishing contribution comes from closing the contour in the positive half-plane, encircling both poles clockwise rather than counter-clockwise (so that the integral again runs from
), and the non-vanishing contribution comes from closing the contour in the positive half-plane, encircling both poles clockwise rather than counter-clockwise (so that the integral again runs from  are superpositions of both positive (
are superpositions of both positive ( ) energy modes, which is necessary in order for them to vanish outside their prescribed lightcones (past and future, respectively). In contrast, the Heaviside functions in the Feynman propagator are tantamount to imposing boundary conditions such that it picks up only positive or negative frequencies, depending on the sign of
) energy modes, which is necessary in order for them to vanish outside their prescribed lightcones (past and future, respectively). In contrast, the Heaviside functions in the Feynman propagator are tantamount to imposing boundary conditions such that it picks up only positive or negative frequencies, depending on the sign of  , we close the contour in the lower-half plane for convergence (
, we close the contour in the lower-half plane for convergence ( ), and enclose
), and enclose  counter-clockwise (in the present conventions, we’re again going from
counter-clockwise (in the present conventions, we’re again going from  when
when  . Hence the corresponding
. Hence the corresponding ![\displaystyle \begin{aligned} iG_F(x,x')&=i\int\frac{\mathrm{d}^dk}{(2\pi)^D}e^{i\mathbf{k}(\mathbf{x}-\mathbf{x}')}\oint\mathrm{d} k_0\frac{e^{-ik_0(x_0-x'_0)}}{-2k_0}\left(\frac{1}{k_0-\sqrt{\mathbf{k}^2+m^2}-i\epsilon}+\frac{1}{k_0+\sqrt{\mathbf{k}^2+m^2}+i\epsilon}\right)\\ &=i\int\frac{\mathrm{d}^dk}{(2\pi)^D}e^{i\mathbf{k}(\mathbf{x}-\mathbf{x}')}\left[(2\pi i)\Theta(x_0-x_0')\frac{e^{-i\omega(x_0-x'_0)}}{-2\omega}+(-2\pi i)\Theta(x_0'-x_0)\frac{e^{i\omega(x_0-x'_0)}}{2\omega}\right]\\ &=\int\frac{\mathrm{d}^dk}{2\omega(2\pi)^d}\left[\Theta(x_0-x_0')e^{ik(x-x')}+\Theta(x_0'-x_0)e^{-ik(x-x')}\right]\\ &=\Theta(t-t')G^+(x,x')+\Theta(t'-t)G^-(x,x')~, \end{aligned} \ \ \ \ \ (25)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+iG_F%28x%2Cx%27%29%26%3Di%5Cint%5Cfrac%7B%5Cmathrm%7Bd%7D%5Edk%7D%7B%282%5Cpi%29%5ED%7De%5E%7Bi%5Cmathbf%7Bk%7D%28%5Cmathbf%7Bx%7D-%5Cmathbf%7Bx%7D%27%29%7D%5Coint%5Cmathrm%7Bd%7D+k_0%5Cfrac%7Be%5E%7B-ik_0%28x_0-x%27_0%29%7D%7D%7B-2k_0%7D%5Cleft%28%5Cfrac%7B1%7D%7Bk_0-%5Csqrt%7B%5Cmathbf%7Bk%7D%5E2%2Bm%5E2%7D-i%5Cepsilon%7D%2B%5Cfrac%7B1%7D%7Bk_0%2B%5Csqrt%7B%5Cmathbf%7Bk%7D%5E2%2Bm%5E2%7D%2Bi%5Cepsilon%7D%5Cright%29%5C%5C+%26%3Di%5Cint%5Cfrac%7B%5Cmathrm%7Bd%7D%5Edk%7D%7B%282%5Cpi%29%5ED%7De%5E%7Bi%5Cmathbf%7Bk%7D%28%5Cmathbf%7Bx%7D-%5Cmathbf%7Bx%7D%27%29%7D%5Cleft%5B%282%5Cpi+i%29%5CTheta%28x_0-x_0%27%29%5Cfrac%7Be%5E%7B-i%5Comega%28x_0-x%27_0%29%7D%7D%7B-2%5Comega%7D%2B%28-2%5Cpi+i%29%5CTheta%28x_0%27-x_0%29%5Cfrac%7Be%5E%7Bi%5Comega%28x_0-x%27_0%29%7D%7D%7B2%5Comega%7D%5Cright%5D%5C%5C+%26%3D%5Cint%5Cfrac%7B%5Cmathrm%7Bd%7D%5Edk%7D%7B2%5Comega%282%5Cpi%29%5Ed%7D%5Cleft%5B%5CTheta%28x_0-x_0%27%29e%5E%7Bik%28x-x%27%29%7D%2B%5CTheta%28x_0%27-x_0%29e%5E%7B-ik%28x-x%27%29%7D%5Cright%5D%5C%5C+%26%3D%5CTheta%28t-t%27%29G%5E%2B%28x%2Cx%27%29%2B%5CTheta%28t%27-t%29G%5E-%28x%2Cx%27%29%7E%2C+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2825%29&bg=ffffff&fg=000000&s=0&c=20201002)
 , we have a negative-energy particle (i.e., an antiparticle) propagating backwards.
, we have a negative-energy particle (i.e., an antiparticle) propagating backwards.
 , is in any of the states
, is in any of the states  with (classical) probability
with (classical) probability
 with respect to (26) are then ensemble averages at fixed temperature
with respect to (26) are then ensemble averages at fixed temperature  :
:
 — will fluctuate as quanta are created or destroyed. Strictly speaking I should also include the chemical potential, since the number operator
— will fluctuate as quanta are created or destroyed. Strictly speaking I should also include the chemical potential, since the number operator  also fluctuates, but it doesn’t play any important role in what follows. (The distinction is worth keeping in mind when discussing black hole thermodynamics, where one should use the microcanonical ensemble instead, because the negative specific heat makes the canonical ensemble unstable).
also fluctuates, but it doesn’t play any important role in what follows. (The distinction is worth keeping in mind when discussing black hole thermodynamics, where one should use the microcanonical ensemble instead, because the negative specific heat makes the canonical ensemble unstable). , are then obtained by replacing the vacuum expectation value with the expectation value in the thermal state, (28); for example, the Wightman functions become
, are then obtained by replacing the vacuum expectation value with the expectation value in the thermal state, (28); for example, the Wightman functions become

 :
:![\displaystyle \begin{aligned} G_\beta^+&=\frac{1}{Z}\mathrm{tr}\left[e^{-\beta H}\phi(t,\mathbf{x})\phi(t,\mathbf{x}')\right] =\frac{1}{Z}\mathrm{tr}\left[e^{-\beta H}\phi(t,\mathbf{x})e^{\beta H}e^{-\beta H}\phi(t,\mathbf{x}')\right]\\ &=\frac{1}{Z}\mathrm{tr}\left[\phi(t+i\beta,\mathbf{x})e^{-\beta H}\phi(t,\mathbf{x}')\right] =\frac{1}{Z}\mathrm{tr}\left[e^{-\beta H}\phi(t',\mathbf{x}')\phi(t+i\beta,\mathbf{x})\right]~, \end{aligned} \ \ \ \ \ (31)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+G_%5Cbeta%5E%2B%26%3D%5Cfrac%7B1%7D%7BZ%7D%5Cmathrm%7Btr%7D%5Cleft%5Be%5E%7B-%5Cbeta+H%7D%5Cphi%28t%2C%5Cmathbf%7Bx%7D%29%5Cphi%28t%2C%5Cmathbf%7Bx%7D%27%29%5Cright%5D+%3D%5Cfrac%7B1%7D%7BZ%7D%5Cmathrm%7Btr%7D%5Cleft%5Be%5E%7B-%5Cbeta+H%7D%5Cphi%28t%2C%5Cmathbf%7Bx%7D%29e%5E%7B%5Cbeta+H%7De%5E%7B-%5Cbeta+H%7D%5Cphi%28t%2C%5Cmathbf%7Bx%7D%27%29%5Cright%5D%5C%5C+%26%3D%5Cfrac%7B1%7D%7BZ%7D%5Cmathrm%7Btr%7D%5Cleft%5B%5Cphi%28t%2Bi%5Cbeta%2C%5Cmathbf%7Bx%7D%29e%5E%7B-%5Cbeta+H%7D%5Cphi%28t%2C%5Cmathbf%7Bx%7D%27%29%5Cright%5D+%3D%5Cfrac%7B1%7D%7BZ%7D%5Cmathrm%7Btr%7D%5Cleft%5Be%5E%7B-%5Cbeta+H%7D%5Cphi%28t%27%2C%5Cmathbf%7Bx%7D%27%29%5Cphi%28t%2Bi%5Cbeta%2C%5Cmathbf%7Bx%7D%29%5Cright%5D%7E%2C+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2831%29&bg=ffffff&fg=000000&s=0&c=20201002)
 . Thus we arrive at the KMS condition
. Thus we arrive at the KMS condition

 .
. by an amount given by the (inverse) temperature
by an amount given by the (inverse) temperature  , the finite-temperature field theory lives on
, the finite-temperature field theory lives on  , where
, where  (observe that as
(observe that as  , we recover the zero temperature Euclidean theory on
, we recover the zero temperature Euclidean theory on 
 is the Schwarzschild radius, and
is the Schwarzschild radius, and  is the metric on the
is the metric on the  sphere, which we’ll ignore since it just comes along for the ride. Recall from
sphere, which we’ll ignore since it just comes along for the ride. Recall from 
 is the radial direction, and — since these are polar coordinates —
is the radial direction, and — since these are polar coordinates —  takes on the role of the angular coordinate, which must be periodic to avoid a conical singularity; that is, for any integer
takes on the role of the angular coordinate, which must be periodic to avoid a conical singularity; that is, for any integer 
 .
. of neuron
of neuron  in layer
in layer  is given by
is given by
 is some non-linear activation function of the neurons in the previous layer, and
is some non-linear activation function of the neurons in the previous layer, and  is an
is an  matrix of weights. The qualifier “random” refers to the fact that the weights and biases are i.i.d. according to the normal distributions
matrix of weights. The qualifier “random” refers to the fact that the weights and biases are i.i.d. according to the normal distributions 
 has been introduced to ensure that the contribution from the previous layer remains
has been introduced to ensure that the contribution from the previous layer remains  regardless of layer width.
regardless of layer width. as fixed, this is a linear combination of independent, normally-distributed variables, so we expect it to be Gaussian as well. Indeed, we can derive this rather easily by considering the characteristic function, which is a somewhat more fundamental way of characterizing probability distributions than the moment and cumulant generating functions we’ve discussed
as fixed, this is a linear combination of independent, normally-distributed variables, so we expect it to be Gaussian as well. Indeed, we can derive this rather easily by considering the characteristic function, which is a somewhat more fundamental way of characterizing probability distributions than the moment and cumulant generating functions we’ve discussed  , the characteristic function is defined as
, the characteristic function is defined as
 exists. Hence for a Gaussian random variable
exists. Hence for a Gaussian random variable  , we have
, we have 

 are independent random variables and
are independent random variables and  are some constants. In the present case, we may view each
are some constants. In the present case, we may view each  as a constant modifying the random variable
as a constant modifying the random variable ![\displaystyle \begin{aligned} \phi_{z_i^l}(t)&=\phi_{b_i^l}(t)\prod_j\phi_{W_{ij}^l}(y_j^{l-1}t) =e^{-\frac{1}{2}\sigma_b^2t^2}\prod_je^{-\frac{1}{2N_{l-1}}\sigma_w^2(y_j^{l-1})^2}\\ &=\exp\left[-\frac{1}{2}\left(\sigma_w^2\frac{1}{N_{l-1}}\sum_j(y_j^{l-1})^2+\sigma_b^2\right) t^2\right]~. \end{aligned} \ \ \ \ \ (6)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+%5Cphi_%7Bz_i%5El%7D%28t%29%26%3D%5Cphi_%7Bb_i%5El%7D%28t%29%5Cprod_j%5Cphi_%7BW_%7Bij%7D%5El%7D%28y_j%5E%7Bl-1%7Dt%29+%3De%5E%7B-%5Cfrac%7B1%7D%7B2%7D%5Csigma_b%5E2t%5E2%7D%5Cprod_je%5E%7B-%5Cfrac%7B1%7D%7B2N_%7Bl-1%7D%7D%5Csigma_w%5E2%28y_j%5E%7Bl-1%7D%29%5E2%7D%5C%5C+%26%3D%5Cexp%5Cleft%5B-%5Cfrac%7B1%7D%7B2%7D%5Cleft%28%5Csigma_w%5E2%5Cfrac%7B1%7D%7BN_%7Bl-1%7D%7D%5Csum_j%28y_j%5E%7Bl-1%7D%29%5E2%2B%5Csigma_b%5E2%5Cright%29+t%5E2%5Cright%5D%7E.+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%286%29&bg=ffffff&fg=000000&s=0&c=20201002)

 limit
limit  becomes the variance of the distribution of inputs across the entire layer. The
becomes the variance of the distribution of inputs across the entire layer. The  is cumbersome), we’ll introduce the notation
is cumbersome), we’ll introduce the notation  to denote the variance of the pre-activations in layer
to denote the variance of the pre-activations in layer 
 to denote the standard normal Gaussian measure, and we’ve defined
to denote the standard normal Gaussian measure, and we’ve defined  so that
so that  . That is, we can’t just write
. That is, we can’t just write
 . Specifically, it assumes that we’re integrating over the real line, whereas we know that
. Specifically, it assumes that we’re integrating over the real line, whereas we know that  in fact lie along a Gaussian. Thus we need a Lebesgue integral (rather than the more familiar Riemann integral) with an appropriate measure—in this case,
in fact lie along a Gaussian. Thus we need a Lebesgue integral (rather than the more familiar Riemann integral) with an appropriate measure—in this case,  . (We could alternatively have written
. (We could alternatively have written  , but it’s cleaner to simply rescale things). Substituting this back into (7), we thus obtain a recursion relation for the variance:
, but it’s cleaner to simply rescale things). Substituting this back into (7), we thus obtain a recursion relation for the variance: 
 to track particular inputs through the network, so that
to track particular inputs through the network, so that  is the value of the
is the value of the  neuron in layer
neuron in layer  ,
,  is its value in response to data
is its value in response to data  , etc., where the data is fed into the network by setting
, etc., where the data is fed into the network by setting  (here boldface letters denote the entire layer, treated as a vector in
(here boldface letters denote the entire layer, treated as a vector in  ). We then consider the two-point correlator between these inputs at a single neuron:
). We then consider the two-point correlator between these inputs at a single neuron:
 , and that the weights and biases are independent with
, and that the weights and biases are independent with  . Note that since
. Note that since  , this also happens to be the covariance
, this also happens to be the covariance  , which we shall denote
, which we shall denote  in accordance with the notation from [1] introduced above.
in accordance with the notation from [1] introduced above.
 and
and  , since that would preclude any correlation in the original inputs
, since that would preclude any correlation in the original inputs  . Rather, any non-zero correlation in the data will propagate through the network, so the appropriate measure is the bivariate normal distribution,
. Rather, any non-zero correlation in the data will propagate through the network, so the appropriate measure is the bivariate normal distribution,![\displaystyle \mathcal{D} z_a\mathcal{D} z_b =\frac{\mathrm{d} z_a\mathrm{d} z_b}{2\pi\sqrt{q_a^{l-1}q_b^{l-1}(1-\rho^2)}}\, \exp\!\left[-\frac{1}{2(1-\rho^2)}\left(\frac{z_a^2}{q_a^{l-1}}+\frac{z_b^2}{q_b^{l-1}}-\frac{2\rho\,z_az_b}{\sqrt{q_a^{l-1}q_b^{l-1}}}\right)\right]~, \ \ \ \ \ (17)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BD%7D+z_a%5Cmathcal%7BD%7D+z_b+%3D%5Cfrac%7B%5Cmathrm%7Bd%7D+z_a%5Cmathrm%7Bd%7D+z_b%7D%7B2%5Cpi%5Csqrt%7Bq_a%5E%7Bl-1%7Dq_b%5E%7Bl-1%7D%281-%5Crho%5E2%29%7D%7D%5C%2C+%5Cexp%5C%21%5Cleft%5B-%5Cfrac%7B1%7D%7B2%281-%5Crho%5E2%29%7D%5Cleft%28%5Cfrac%7Bz_a%5E2%7D%7Bq_a%5E%7Bl-1%7D%7D%2B%5Cfrac%7Bz_b%5E2%7D%7Bq_b%5E%7Bl-1%7D%7D-%5Cfrac%7B2%5Crho%5C%2Cz_az_b%7D%7B%5Csqrt%7Bq_a%5E%7Bl-1%7Dq_b%5E%7Bl-1%7D%7D%7D%5Cright%29%5Cright%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2817%29&bg=ffffff&fg=000000&s=0&c=20201002)

 by
by  . If the inputs are uncorrelated (i.e.,
. If the inputs are uncorrelated (i.e.,  ), then
), then  , and the measure reduces to a product of independent Gaussian variables, as expected. (I say “as expected” because the individual inputs
, and the measure reduces to a product of independent Gaussian variables, as expected. (I say “as expected” because the individual inputs  is only sensitive to linear relationships between random variables
is only sensitive to linear relationships between random variables  ; if these are related non-linearly, then it’s possible for them to be dependent (
; if these are related non-linearly, then it’s possible for them to be dependent ( ) despite being uncorrelated (
) despite being uncorrelated ( ). See Wikipedia for a
). See Wikipedia for a  such that
such that 


 given by (19). Note that since
given by (19). Note that since  ) follows from their uncorrelatedness,
) follows from their uncorrelatedness,  ; the latter is easily shown by direct computation, and recalling that
; the latter is easily shown by direct computation, and recalling that  .
. ,
,  , which one can determine graphically (i.e., numerically) for a given choice of non-linear activation
, which one can determine graphically (i.e., numerically) for a given choice of non-linear activation  . For example, the case
. For example, the case  is plotted in fig. 1 of [1] (shown below), demonstrating that the fixed point condition
is plotted in fig. 1 of [1] (shown below), demonstrating that the fixed point condition
 . Therefore, when the parameters of the network (i.e., the distributions (2)) are tuned appropriately, the variance remains constant as signals propagate through the layers. This is useful, because it means that non-zero biases at each layer prevent signals from decaying to zero. Furthermore, provided the non-linearity
. Therefore, when the parameters of the network (i.e., the distributions (2)) are tuned appropriately, the variance remains constant as signals propagate through the layers. This is useful, because it means that non-zero biases at each layer prevent signals from decaying to zero. Furthermore, provided the non-linearity  , the dynamics ensures convergence to
, the dynamics ensures convergence to  for all initial values. To visualize this, consider the following figure, which I took from [1] (
for all initial values. To visualize this, consider the following figure, which I took from [1] ( is their notation for the recursion relation (14)). In the left plot, I’ve added the red arrows illustrating the convergence to the fixed point for
is their notation for the recursion relation (14)). In the left plot, I’ve added the red arrows illustrating the convergence to the fixed point for  . For the particular starting point I chose, it takes about 3 iterations to converge, which is consistent with the plot on the right.
. For the particular starting point I chose, it takes about 3 iterations to converge, which is consistent with the plot on the right.
 ,
,  . Hence by dividing (21) by
. Hence by dividing (21) by ![\displaystyle \rho^l=\frac{\sigma_w^2}{q^*}\int\!\mathcal{D} z_1\mathcal{D} z_2\, \phi\left(\sqrt{q^*}z_1\right) \phi\left(\sqrt{q^*}\left[\rho^{l-1}z_1+\sqrt{1-(\rho^{l-1})^2}z_2\right]\right) +\frac{\sigma_b^2}{q^*}~. \ \ \ \ \ (23)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Crho%5El%3D%5Cfrac%7B%5Csigma_w%5E2%7D%7Bq%5E%2A%7D%5Cint%5C%21%5Cmathcal%7BD%7D+z_1%5Cmathcal%7BD%7D+z_2%5C%2C+%5Cphi%5Cleft%28%5Csqrt%7Bq%5E%2A%7Dz_1%5Cright%29+%5Cphi%5Cleft%28%5Csqrt%7Bq%5E%2A%7D%5Cleft%5B%5Crho%5E%7Bl-1%7Dz_1%2B%5Csqrt%7B1-%28%5Crho%5E%7Bl-1%7D%29%5E2%7Dz_2%5Cright%5D%5Cright%29+%2B%5Cfrac%7B%5Csigma_b%5E2%7D%7Bq%5E%2A%7D%7E.+%5C+%5C+%5C+%5C+%5C+%2823%29&bg=ffffff&fg=000000&s=0&c=20201002)
 :
:
 , and we have identified the single-neuron variance
, and we have identified the single-neuron variance  , cf. (14), which is
, cf. (14), which is  .
. :
: 
 (the second equality is not obvious; see the derivation at the end of this post if you’re curious). The reason is that for monotonic functions
(the second equality is not obvious; see the derivation at the end of this post if you’re curious). The reason is that for monotonic functions  implies that the curve (23) must approach the unity line from above (i.e., it’s concave, or has a constant slope with a vertical offset at
implies that the curve (23) must approach the unity line from above (i.e., it’s concave, or has a constant slope with a vertical offset at  set by the biases), and hence in this case
set by the biases), and hence in this case  is driven towards the fixed point
is driven towards the fixed point  , the curve must be approaching this point from below (i.e., it’s convex), and hence in this case
, the curve must be approaching this point from below (i.e., it’s convex), and hence in this case  . (It may help to sketch a few examples, like I superimposed on the left figure above, to convince yourself that this slope/convergence argument works).
. (It may help to sketch a few examples, like I superimposed on the left figure above, to convince yourself that this slope/convergence argument works). . At exactly
. At exactly  , the system lies at a critical point, and should therefore be characterized some divergence(s) (recall that, in the limit
, the system lies at a critical point, and should therefore be characterized some divergence(s) (recall that, in the limit  , a phase transition is defined by the discontinuous change of some quantity; one often hears of an “
, a phase transition is defined by the discontinuous change of some quantity; one often hears of an “ order phase transition” if the discontinuity lies in the
order phase transition” if the discontinuity lies in the  . To determine the fall-off behaviour, we expand near the critical point, and examine the difference
. To determine the fall-off behaviour, we expand near the critical point, and examine the difference  as
as  (where recall
(where recall  . The limit simply ensures that
. The limit simply ensures that  exist; as shown above, we don’t have to wait that long in practice). This is done explicitly in [2], so I won’t work through all the details here; the result is that upon expanding
exist; as shown above, we don’t have to wait that long in practice). This is done explicitly in [2], so I won’t work through all the details here; the result is that upon expanding  , one finds the recurrence relation
, one finds the recurrence relation 
 . This implies that, at least asymptotically,
. This implies that, at least asymptotically,  , which one can verify by substituting this into (26) and identifying
, which one can verify by substituting this into (26) and identifying ![\displaystyle \xi^{-1}=-\ln\left[\sigma_w^2\int\!\mathcal{D} z_1\mathcal{D} z_2\,\phi'(z_a)\phi'(z_b)\right]~. \ \ \ \ \ (27)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cxi%5E%7B-1%7D%3D-%5Cln%5Cleft%5B%5Csigma_w%5E2%5Cint%5C%21%5Cmathcal%7BD%7D+z_1%5Cmathcal%7BD%7D+z_2%5C%2C%5Cphi%27%28z_a%29%5Cphi%27%28z_b%29%5Cright%5D%7E.+%5C+%5C+%5C+%5C+%5C+%2827%29&bg=ffffff&fg=000000&s=0&c=20201002)
 is the correlation length that governs the propagation of information — i.e., the decay of the two-point correlator — through the network. And again, we know from our discussion in
is the correlation length that governs the propagation of information — i.e., the decay of the two-point correlator — through the network. And again, we know from our discussion in  , observe that the argument of (27) reduces to (25), i.e.,
, observe that the argument of (27) reduces to (25), i.e.,
 , we expect that the basic conclusion about trainability above still holds even if the correlation length remains finite. And indeed, the main result of [2] is that at the critical point, not only can information about the inputs propagate all the way through the network, but information about the gradients can also propagate backwards (that is, exploding/vanishing gradients happen only in the ordered/chaotic phases, respectively, but are stable at the phase transition), and consequently these random networks are trainable provided
, we expect that the basic conclusion about trainability above still holds even if the correlation length remains finite. And indeed, the main result of [2] is that at the critical point, not only can information about the inputs propagate all the way through the network, but information about the gradients can also propagate backwards (that is, exploding/vanishing gradients happen only in the ordered/chaotic phases, respectively, but are stable at the phase transition), and consequently these random networks are trainable provided  .
.
 — denoted simply
— denoted simply  (cf.(19)), we have from (23)
(cf.(19)), we have from (23)
 . We therefore have the identities
. We therefore have the identities


 , whereupon the second term vanishes,
, whereupon the second term vanishes,

 , the ratio of depth to width (this works for most deep networks of practical interest, which typically have
, the ratio of depth to width (this works for most deep networks of practical interest, which typically have  ). Finite-width corrections appear at
). Finite-width corrections appear at  , which physically correspond to effective interactions that arise upon marginalizing over hidden degrees of freedom; see my post on
, which physically correspond to effective interactions that arise upon marginalizing over hidden degrees of freedom; see my post on  correction to the MFT (i.e., tree level) result, which is independent of network size, and therefore survives in the
correction to the MFT (i.e., tree level) result, which is independent of network size, and therefore survives in the  spins per direction):
spins per direction): 
 , and for compactness I’m employing Einstein’s summation convention with
, and for compactness I’m employing Einstein’s summation convention with  and
and  . Since all directions are spacelike, there’s no difference between raised and lowered indices (e.g.,
. Since all directions are spacelike, there’s no difference between raised and lowered indices (e.g.,  ), so I’ll denote the inverse matrix
), so I’ll denote the inverse matrix  explicitly to avoid any possible confusion, i.e.,
explicitly to avoid any possible confusion, i.e.,  and
and  . In a 1d lattice, one would typically avoid boundary effects by joining the ends into an
. In a 1d lattice, one would typically avoid boundary effects by joining the ends into an  , but this issue won’t be relevant for our purposes, as we’ll be interested in the thermodynamic limit
, but this issue won’t be relevant for our purposes, as we’ll be interested in the thermodynamic limit  , the effect of all the other spins acts like an external magnetic field. That is, observe that we may write (1) as
, the effect of all the other spins acts like an external magnetic field. That is, observe that we may write (1) as 
 by the average value,
by the average value,  . We’ll give a more thorough Bayesian treatment of MFT below, but the idea here is that since no spin is special, the most likely value of
. We’ll give a more thorough Bayesian treatment of MFT below, but the idea here is that since no spin is special, the most likely value of 
 . This is illustrated explicitly in John McGreevy’s entertaining
. This is illustrated explicitly in John McGreevy’s entertaining ![\displaystyle \begin{aligned} \sigma_i\sigma_i&=\left[s+(\sigma_i-s)\right]\left[s+(\sigma_j-s)\right] =\left( s+\delta s_i\right)\left( s+\delta s_j\right)\\ &=s^2+s\left( \delta s_i+\delta s_j\right)+O(\delta s^2) =-s^2+s\left(\sigma_i+\sigma_j\right)+O(\delta s^2)~, \end{aligned} \ \ \ \ \ (5)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+%5Csigma_i%5Csigma_i%26%3D%5Cleft%5Bs%2B%28%5Csigma_i-s%29%5Cright%5D%5Cleft%5Bs%2B%28%5Csigma_j-s%29%5Cright%5D+%3D%5Cleft%28+s%2B%5Cdelta+s_i%5Cright%29%5Cleft%28+s%2B%5Cdelta+s_j%5Cright%29%5C%5C+%26%3Ds%5E2%2Bs%5Cleft%28+%5Cdelta+s_i%2B%5Cdelta+s_j%5Cright%29%2BO%28%5Cdelta+s%5E2%29+%3D-s%5E2%2Bs%5Cleft%28%5Csigma_i%2B%5Csigma_j%5Cright%29%2BO%28%5Cdelta+s%5E2%29%7E%2C+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%285%29&bg=ffffff&fg=000000&s=0&c=20201002)
 . We then substitute this into the hamiltonian (1); taking
. We then substitute this into the hamiltonian (1); taking  for simplicity, we obtain
for simplicity, we obtain 
 , this procedure yields the Boltzmann distribution
, this procedure yields the Boltzmann distribution ![\displaystyle p_i\equiv p(x_i)=\frac{1}{Z[\beta]}e^{-\beta E_i}~, \qquad\qquad\sum_ip_i=1~, \ \ \ \ \ (7)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+p_i%5Cequiv+p%28x_i%29%3D%5Cfrac%7B1%7D%7BZ%5B%5Cbeta%5D%7De%5E%7B-%5Cbeta+E_i%7D%7E%2C+%5Cqquad%5Cqquad%5Csum_ip_i%3D1%7E%2C+%5C+%5C+%5C+%5C+%5C+%287%29&bg=ffffff&fg=000000&s=0&c=20201002)
 , and we identify the inverse temperature
, and we identify the inverse temperature 
![{Z[\beta]=e^{\beta\lambda}}](https://s0.wp.com/latex.php?latex=%7BZ%5B%5Cbeta%5D%3De%5E%7B%5Cbeta%5Clambda%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) where
where  is the Lagrange multiplier for the normalization constraint, cf. the max-ent procedure
is the Lagrange multiplier for the normalization constraint, cf. the max-ent procedure  , provides an upper bound on the true (equilibrium) free energy
, provides an upper bound on the true (equilibrium) free energy  :
:
 (henceforth I’ll refer to this simply as the free energy, without the “normalized” qualifier). This statement, sometimes referred to as the Bogolyubov inequality, can be
(henceforth I’ll refer to this simply as the free energy, without the “normalized” qualifier). This statement, sometimes referred to as the Bogolyubov inequality, can be ![\displaystyle \begin{aligned} Z_\textrm{\tiny{MF}}&=\sum_{\{\sigma\}}e^{-\beta H_\textrm{\tiny{MF}}} =\prod_{k=1}^N\sum_{\sigma_k=\pm1}\exp\left[-NdJs^2+\left(2dJs+h\right)\sum_i\sigma_i\right]\\ &=e^{-NdJs^2}\prod_{k=1}^N\exp\left[-\left(2dJs+h\right)+\left(2dJs+h\right)\right]\\ &=2^Ne^{-NdJs^2}\cosh^N\left(2dJs+h\right)~. \end{aligned} \ \ \ \ \ (10)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+Z_%5Ctextrm%7B%5Ctiny%7BMF%7D%7D%26%3D%5Csum_%7B%5C%7B%5Csigma%5C%7D%7De%5E%7B-%5Cbeta+H_%5Ctextrm%7B%5Ctiny%7BMF%7D%7D%7D+%3D%5Cprod_%7Bk%3D1%7D%5EN%5Csum_%7B%5Csigma_k%3D%5Cpm1%7D%5Cexp%5Cleft%5B-NdJs%5E2%2B%5Cleft%282dJs%2Bh%5Cright%29%5Csum_i%5Csigma_i%5Cright%5D%5C%5C+%26%3De%5E%7B-NdJs%5E2%7D%5Cprod_%7Bk%3D1%7D%5EN%5Cexp%5Cleft%5B-%5Cleft%282dJs%2Bh%5Cright%29%2B%5Cleft%282dJs%2Bh%5Cright%29%5Cright%5D%5C%5C+%26%3D2%5ENe%5E%7B-NdJs%5E2%7D%5Ccosh%5EN%5Cleft%282dJs%2Bh%5Cright%29%7E.+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2810%29&bg=ffffff&fg=000000&s=0&c=20201002)
 neighbors with coupling strength
neighbors with coupling strength  and
and  ). The corresponding free energy is then
). The corresponding free energy is then 
 term, since this doesn’t contribute to any of the observables for which
term, since this doesn’t contribute to any of the observables for which  :
: 
 , it looks as though
, it looks as though  , and therefore
, and therefore
 . Substituting in (3) for the homogeneous nearest-neighbor case at hand (that is, without the factor of
. Substituting in (3) for the homogeneous nearest-neighbor case at hand (that is, without the factor of  , cf. (6)) then gives precisely (12).
, cf. (6)) then gives precisely (12). , the global minimum of
, the global minimum of  is given by the intersection at positive
is given by the intersection at positive  in contrast, there’s a single minimum at
in contrast, there’s a single minimum at  for high temperatures, and two degenerate minima at
for high temperatures, and two degenerate minima at  at low temperatures (depending on whether
at low temperatures (depending on whether  crosses
crosses  ; to see this, recall that for small
; to see this, recall that for small  , so a sufficiently small value of
, so a sufficiently small value of 
 ,
,  , while for
, while for  ,
,  ; we’ll have more to say about this failure below.
; we’ll have more to say about this failure below. will always be small (
will always be small ( ) independent of
) independent of  (since
(since  ), so we can expand
), so we can expand


 changes at the critical temperature
changes at the critical temperature  , which determines whether the global minimum of
, which determines whether the global minimum of  (
( ) or
) or  (
( ). The physical interpretation is that below the critical temperature, it is energetically favourable for the spins to align, resulting in a non-zero magnetization (which is what the average spin
). The physical interpretation is that below the critical temperature, it is energetically favourable for the spins to align, resulting in a non-zero magnetization (which is what the average spin  is). Above the critical temperature however, thermal fluctuations disrupt this ordering, so the net magnetization is zero. For this reason, the magnetization
is). Above the critical temperature however, thermal fluctuations disrupt this ordering, so the net magnetization is zero. For this reason, the magnetization 
 ,
,  . The first step is to apply the Hubbard-Stratanovich transformation,
. The first step is to apply the Hubbard-Stratanovich transformation, ![\displaystyle e^{\frac{1}{2}K^{ij}s_is_j}=\left[\frac{\mathrm{det}K}{(2\pi)^N}\right]^{1/2}\!\int\!\mathrm{d}^N\phi\exp\left(-\frac{1}{2}K^{ij}\phi_i\phi_j+K^{ij}s_i\phi_j\right)~, \qquad\forall\,s_i\in\mathbb{R}~. \ \ \ \ \ (19)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+e%5E%7B%5Cfrac%7B1%7D%7B2%7DK%5E%7Bij%7Ds_is_j%7D%3D%5Cleft%5B%5Cfrac%7B%5Cmathrm%7Bdet%7DK%7D%7B%282%5Cpi%29%5EN%7D%5Cright%5D%5E%7B1%2F2%7D%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5EN%5Cphi%5Cexp%5Cleft%28-%5Cfrac%7B1%7D%7B2%7DK%5E%7Bij%7D%5Cphi_i%5Cphi_j%2BK%5E%7Bij%7Ds_i%5Cphi_j%5Cright%29%7E%2C+%5Cqquad%5Cforall%5C%2Cs_i%5Cin%5Cmathbb%7BR%7D%7E.+%5C+%5C+%5C+%5C+%5C+%2819%29&bg=ffffff&fg=000000&s=0&c=20201002)
 ). Applying this transformation to the first term in the partition function, we have
). Applying this transformation to the first term in the partition function, we have ![\displaystyle Z=\left[\frac{\mathrm{det}J}{(2\pi)^N}\right]^{1/2}\!\int\!\mathrm{d}^N\phi\sum_{\{\sigma\}}\exp\left[-\frac{1}{2}J^{ij}\phi_i\phi_j+\left( J^{ij}\phi_j+h^i\right)\sigma_i\right]~. \ \ \ \ \ (20)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+Z%3D%5Cleft%5B%5Cfrac%7B%5Cmathrm%7Bdet%7DJ%7D%7B%282%5Cpi%29%5EN%7D%5Cright%5D%5E%7B1%2F2%7D%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5EN%5Cphi%5Csum_%7B%5C%7B%5Csigma%5C%7D%7D%5Cexp%5Cleft%5B-%5Cfrac%7B1%7D%7B2%7DJ%5E%7Bij%7D%5Cphi_i%5Cphi_j%2B%5Cleft%28+J%5E%7Bij%7D%5Cphi_j%2Bh%5Ei%5Cright%29%5Csigma_i%5Cright%5D%7E.+%5C+%5C+%5C+%5C+%5C+%2820%29&bg=ffffff&fg=000000&s=0&c=20201002)
 , leaving us with an expression entirely in terms of the new field variables
, leaving us with an expression entirely in terms of the new field variables ![\displaystyle \sum_{\sigma_i=\pm1}\exp\left[\left( J^{ij}\phi_j+h^i\right)\sigma_i\right]=2\cosh\left( J^{ij}\phi_j+h^i\right)~, \ \ \ \ \ (21)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Csum_%7B%5Csigma_i%3D%5Cpm1%7D%5Cexp%5Cleft%5B%5Cleft%28+J%5E%7Bij%7D%5Cphi_j%2Bh%5Ei%5Cright%29%5Csigma_i%5Cright%5D%3D2%5Ccosh%5Cleft%28+J%5E%7Bij%7D%5Cphi_j%2Bh%5Ei%5Cright%29%7E%2C+%5C+%5C+%5C+%5C+%5C+%2821%29&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle Z=\left[\left(\frac{2}{\pi}\right)^N\!\mathrm{det}J\right]^{1/2}\!\int\!\mathrm{d}^N\phi\exp\!\left[-\frac{1}{2}J^{ij}\phi_i\phi_j+\sum_i\ln\cosh\left( J^{ij}\phi_j+h^i\right)\right]~. \ \ \ \ \ (22)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+Z%3D%5Cleft%5B%5Cleft%28%5Cfrac%7B2%7D%7B%5Cpi%7D%5Cright%29%5EN%5C%21%5Cmathrm%7Bdet%7DJ%5Cright%5D%5E%7B1%2F2%7D%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5EN%5Cphi%5Cexp%5C%21%5Cleft%5B-%5Cfrac%7B1%7D%7B2%7DJ%5E%7Bij%7D%5Cphi_i%5Cphi_j%2B%5Csum_i%5Cln%5Ccosh%5Cleft%28+J%5E%7Bij%7D%5Cphi_j%2Bh%5Ei%5Cright%29%5Cright%5D%7E.+%5C+%5C+%5C+%5C+%5C+%2822%29&bg=ffffff&fg=000000&s=0&c=20201002)
 can be thought of as the mean field
can be thought of as the mean field  at site
at site  by inverting this identification:
by inverting this identification:
 , that
, that
![\displaystyle Z=\left[\left(\frac{2}{\pi}\right)^N\!\mathrm{det}J^{-1}\right]^{1/2}\!e^{-\frac{1}{2}J^{-1}_{ij}h^ih^j}\!\int\!\mathrm{d}^N\!\mu\exp\!\left[-\frac{1}{2}J^{-1}_{ij}\mu^i\mu^j+J^{-1}_{ij}h^i\mu^j+\sum_i\ln\cosh\mu_i\right]~, \ \ \ \ \ (25)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+Z%3D%5Cleft%5B%5Cleft%28%5Cfrac%7B2%7D%7B%5Cpi%7D%5Cright%29%5EN%5C%21%5Cmathrm%7Bdet%7DJ%5E%7B-1%7D%5Cright%5D%5E%7B1%2F2%7D%5C%21e%5E%7B-%5Cfrac%7B1%7D%7B2%7DJ%5E%7B-1%7D_%7Bij%7Dh%5Eih%5Ej%7D%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5EN%5C%21%5Cmu%5Cexp%5C%21%5Cleft%5B-%5Cfrac%7B1%7D%7B2%7DJ%5E%7B-1%7D_%7Bij%7D%5Cmu%5Ei%5Cmu%5Ej%2BJ%5E%7B-1%7D_%7Bij%7Dh%5Ei%5Cmu%5Ej%2B%5Csum_i%5Cln%5Ccosh%5Cmu_i%5Cright%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2825%29&bg=ffffff&fg=000000&s=0&c=20201002)
 . We can then expand
. We can then expand
![\displaystyle Z\approx\left[\left(\frac{2}{\pi}\right)^N\!\mathrm{det}J^{-1}\right]^{1/2}\!e^{-\frac{1}{2}J^{-1}_{ij}h^ih^j}\!\int\!\mathrm{d}^N\mu\exp\!\left[-\frac{1}{2}J^{-1}_{ij}\mu^i\mu^j +J^{-1}_{ij}h^i\mu^j +\sum_i\left(\frac{1}{2}\mu_i^2-\frac{1}{12}\mu_i^4\right)\right]~. \ \ \ \ \ (27)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+Z%5Capprox%5Cleft%5B%5Cleft%28%5Cfrac%7B2%7D%7B%5Cpi%7D%5Cright%29%5EN%5C%21%5Cmathrm%7Bdet%7DJ%5E%7B-1%7D%5Cright%5D%5E%7B1%2F2%7D%5C%21e%5E%7B-%5Cfrac%7B1%7D%7B2%7DJ%5E%7B-1%7D_%7Bij%7Dh%5Eih%5Ej%7D%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5EN%5Cmu%5Cexp%5C%21%5Cleft%5B-%5Cfrac%7B1%7D%7B2%7DJ%5E%7B-1%7D_%7Bij%7D%5Cmu%5Ei%5Cmu%5Ej+%2BJ%5E%7B-1%7D_%7Bij%7Dh%5Ei%5Cmu%5Ej+%2B%5Csum_i%5Cleft%28%5Cfrac%7B1%7D%7B2%7D%5Cmu_i%5E2-%5Cfrac%7B1%7D%7B12%7D%5Cmu_i%5E4%5Cright%29%5Cright%5D%7E.+%5C+%5C+%5C+%5C+%5C+%2827%29&bg=ffffff&fg=000000&s=0&c=20201002)
 (i.e.,
(i.e.,  and
and  ), and obtain the path-integral measure
), and obtain the path-integral measure![\displaystyle \left[\left(\frac{2}{\pi}\right)^N\!\mathrm{det}J^{-1}\right]^{1/2}\!e^{-\frac{1}{2}J^{-1}_{ij}h^ih^j}\!\int\!\mathrm{d}^N\mu \;\longrightarrow\;\mathcal{N}\!\int\!\mathcal{D}\mu~. \ \ \ \ \ (28)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cleft%5B%5Cleft%28%5Cfrac%7B2%7D%7B%5Cpi%7D%5Cright%29%5EN%5C%21%5Cmathrm%7Bdet%7DJ%5E%7B-1%7D%5Cright%5D%5E%7B1%2F2%7D%5C%21e%5E%7B-%5Cfrac%7B1%7D%7B2%7DJ%5E%7B-1%7D_%7Bij%7Dh%5Eih%5Ej%7D%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5EN%5Cmu+%5C%3B%5Clongrightarrow%5C%3B%5Cmathcal%7BN%7D%5C%21%5Cint%5C%21%5Cmathcal%7BD%7D%5Cmu%7E.+%5C+%5C+%5C+%5C+%5C+%2828%29&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle \begin{aligned} Z\approx\mathcal{N}\!\int\!\mathcal{D}\mu\exp\bigg\{\!&-\frac{1}{2}\int\!\mathrm{d}\mathbf{x}\mathrm{d}\mathbf{y}\,\mu(\mathbf{x})J^{-1}(\mathbf{x}-\mathbf{y})\big[\mu(\mathbf{y})-h\big]\\ &+\frac{1}{2}\int\!\mathrm{d}\mathbf{x}\left[\mu(\mathbf{x})^2-\frac{1}{6}\mu(\mathbf{x})^4\right]\bigg\}~, \end{aligned} \ \ \ \ \ (29)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+Z%5Capprox%5Cmathcal%7BN%7D%5C%21%5Cint%5C%21%5Cmathcal%7BD%7D%5Cmu%5Cexp%5Cbigg%5C%7B%5C%21%26-%5Cfrac%7B1%7D%7B2%7D%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bx%7D%5Cmathrm%7Bd%7D%5Cmathbf%7By%7D%5C%2C%5Cmu%28%5Cmathbf%7Bx%7D%29J%5E%7B-1%7D%28%5Cmathbf%7Bx%7D-%5Cmathbf%7By%7D%29%5Cbig%5B%5Cmu%28%5Cmathbf%7By%7D%29-h%5Cbig%5D%5C%5C+%26%2B%5Cfrac%7B1%7D%7B2%7D%5Cint%5C%21%5Cmathrm%7Bd%7D%5Cmathbf%7Bx%7D%5Cleft%5B%5Cmu%28%5Cmathbf%7Bx%7D%29%5E2-%5Cfrac%7B1%7D%7B6%7D%5Cmu%28%5Cmathbf%7Bx%7D%29%5E4%5Cright%5D%5Cbigg%5C%7D%7E%2C+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2829%29&bg=ffffff&fg=000000&s=0&c=20201002)
 , since the external magnetic field is the same for all lattice sites, cf. the definition of
, since the external magnetic field is the same for all lattice sites, cf. the definition of  below (1).
below (1). , except that it be a symmetric invertible matrix, with no self-interactions (
, except that it be a symmetric invertible matrix, with no self-interactions ( and Taylor expand the field
and Taylor expand the field  around
around 
 as mediating interactions between fields at infinitesimally separated points in space, with increasingly non-local (i.e., higher-derivative) terms suppressed by powers of the separation. Upon substituting this expansion into (29), and working to second-order in this local expansion, one obtains a partition function of the form
as mediating interactions between fields at infinitesimally separated points in space, with increasingly non-local (i.e., higher-derivative) terms suppressed by powers of the separation. Upon substituting this expansion into (29), and working to second-order in this local expansion, one obtains a partition function of the form ![\displaystyle Z\approx\mathcal{N}\!\int\!\mathcal{D}\mu\,e^{-S[\mu]}~, \ \ \ \ \ (31)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+Z%5Capprox%5Cmathcal%7BN%7D%5C%21%5Cint%5C%21%5Cmathcal%7BD%7D%5Cmu%5C%2Ce%5E%7B-S%5B%5Cmu%5D%7D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2831%29&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle S[\mu]=\int\!\mathrm{d}^d\mathbf{x}\left[\frac{1}{2}\kappa(\nabla\mu)^2-h\mu+\frac{1}{2}\tilde r\mu^2+\frac{\tilde g}{4!}\mu^4\right]~, \ \ \ \ \ (32)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+S%5B%5Cmu%5D%3D%5Cint%5C%21%5Cmathrm%7Bd%7D%5Ed%5Cmathbf%7Bx%7D%5Cleft%5B%5Cfrac%7B1%7D%7B2%7D%5Ckappa%28%5Cnabla%5Cmu%29%5E2-h%5Cmu%2B%5Cfrac%7B1%7D%7B2%7D%5Ctilde+r%5Cmu%5E2%2B%5Cfrac%7B%5Ctilde+g%7D%7B4%21%7D%5Cmu%5E4%5Cright%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2832%29&bg=ffffff&fg=000000&s=0&c=20201002)
 ,
,  , and
, and  are some (analytic) functions of the physical parameters, and can be expressed in terms of the zero modes of the inverse coupling matrix. I’m not going to go through the details of that computation here, since a great exposition is already available in the answer to
are some (analytic) functions of the physical parameters, and can be expressed in terms of the zero modes of the inverse coupling matrix. I’m not going to go through the details of that computation here, since a great exposition is already available in the answer to  term).
term). , and expanding the action to second order in the fluctuations
, and expanding the action to second order in the fluctuations  , we have
, we have ![\displaystyle Z\approx\mathcal{N} e^{-S[\mu_0]}\int\!\mathcal{D}\mu\,e^{-\frac{1}{2}(\mu-\mu_0)^2S''[\mu_0]}~, \ \ \ \ \ (33)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+Z%5Capprox%5Cmathcal%7BN%7D+e%5E%7B-S%5B%5Cmu_0%5D%7D%5Cint%5C%21%5Cmathcal%7BD%7D%5Cmu%5C%2Ce%5E%7B-%5Cfrac%7B1%7D%7B2%7D%28%5Cmu-%5Cmu_0%29%5E2S%27%27%5B%5Cmu_0%5D%7D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2833%29&bg=ffffff&fg=000000&s=0&c=20201002)
 , and the linear term has vanished by definition, i.e.,
, and the linear term has vanished by definition, i.e., 
![\displaystyle Z\approx\mathcal{N} e^{-S[\mu_0]} \quad\mathrm{with}\quad S[\mu_0]=\int\!\mathrm{d}^d\mathbf{x}\left(\tilde r\mu_0^2+\frac{\tilde g}{8}\mu_0^4-\frac{3}{2}h\mu_0\right)~, \ \ \ \ \ (35)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+Z%5Capprox%5Cmathcal%7BN%7D+e%5E%7B-S%5B%5Cmu_0%5D%7D+%5Cquad%5Cmathrm%7Bwith%7D%5Cquad+S%5B%5Cmu_0%5D%3D%5Cint%5C%21%5Cmathrm%7Bd%7D%5Ed%5Cmathbf%7Bx%7D%5Cleft%28%5Ctilde+r%5Cmu_0%5E2%2B%5Cfrac%7B%5Ctilde+g%7D%7B8%7D%5Cmu_0%5E4-%5Cfrac%7B3%7D%7B2%7Dh%5Cmu_0%5Cright%29%7E%2C+%5C+%5C+%5C+%5C+%5C+%2835%29&bg=ffffff&fg=000000&s=0&c=20201002)

 term. In the second equality, we have simply extracted the factor of
term. In the second equality, we have simply extracted the factor of  (cf. the absorption of
(cf. the absorption of  in (18), and the definition of
in (18), and the definition of  ,
,  , and
, and  . For
. For ![{S''[\mu_0]}](https://s0.wp.com/latex.php?latex=%7BS%27%27%5B%5Cmu_0%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) , we have the operator
, we have the operator
 . Substituting this into (33) and doing the Gaussian integral, one finds that the contribution from this term is given by the sum of the eigenvalues of the operator
. Substituting this into (33) and doing the Gaussian integral, one finds that the contribution from this term is given by the sum of the eigenvalues of the operator  . I’m not going to go through this in detail, since this post is getting long-winded, and
. I’m not going to go through this in detail, since this post is getting long-winded, and  , but the fluctuations diverge in
, but the fluctuations diverge in  and hence render its conclusions invalid. We’ll give a better explanation for this dimensional-dependent validity below.
and hence render its conclusions invalid. We’ll give a better explanation for this dimensional-dependent validity below. symmetry if
symmetry if  , so the squared mass
, so the squared mass  , a sextic coupling would have dimension
, a sextic coupling would have dimension  , and so on. Recall that a coupling is relevant if its mass dimension
, and so on. Recall that a coupling is relevant if its mass dimension  (since the dimensionless coupling carries a factor of
(since the dimensionless coupling carries a factor of  , e.g.,
, e.g.,  ), irrelevant if
), irrelevant if  (since it runs like
(since it runs like  ), and marginal if
), and marginal if  . Thus we see that the quadratic term is always relevant, and that higher-order corrections are increasingly suppressed under RG in a dimension-dependent manner.
. Thus we see that the quadratic term is always relevant, and that higher-order corrections are increasingly suppressed under RG in a dimension-dependent manner. term in the saddle point — is to compute the Gaussian path integral consisting of only the quadratic contribution, and treat the quartic and higher terms perturbatively. (As these originally arose from higher-order terms in the Taylor expansion, this is morally in line with simply taking
term in the saddle point — is to compute the Gaussian path integral consisting of only the quadratic contribution, and treat the quartic and higher terms perturbatively. (As these originally arose from higher-order terms in the Taylor expansion, this is morally in line with simply taking  in the MFT result
in the MFT result  ). Treating the action as a Gaussian integral also allows us to obtain a simple expression for the two-point correlator that captures the limiting behaviour in which we’re primarily interested. That is, tying all this back to the information theory / neural network connections alluded in the introduction, we’re ultimately interested in understanding the propagation of information near the critical point, so understanding how correlation functions behave in the leading-order / MFT / saddle point approximation — and how perturbative corrections from fluctuations might affect this — is of prime importance.
). Treating the action as a Gaussian integral also allows us to obtain a simple expression for the two-point correlator that captures the limiting behaviour in which we’re primarily interested. That is, tying all this back to the information theory / neural network connections alluded in the introduction, we’re ultimately interested in understanding the propagation of information near the critical point, so understanding how correlation functions behave in the leading-order / MFT / saddle point approximation — and how perturbative corrections from fluctuations might affect this — is of prime importance.![\displaystyle S[\mu]=\int\!\mathrm{d}^d\mathbf{x}\left[\frac{1}{2}(\nabla\mu(\mathbf{x}))^2+\frac{m^2}{2}\mu(\mathbf{x})^2-h\mu(\mathbf{x})\right]~, \ \ \ \ \ (38)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+S%5B%5Cmu%5D%3D%5Cint%5C%21%5Cmathrm%7Bd%7D%5Ed%5Cmathbf%7Bx%7D%5Cleft%5B%5Cfrac%7B1%7D%7B2%7D%28%5Cnabla%5Cmu%28%5Cmathbf%7Bx%7D%29%29%5E2%2B%5Cfrac%7Bm%5E2%7D%7B2%7D%5Cmu%28%5Cmathbf%7Bx%7D%29%5E2-h%5Cmu%28%5Cmathbf%7Bx%7D%29%5Cright%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2838%29&bg=ffffff&fg=000000&s=0&c=20201002)
 and relabelled the quadratic coefficient
and relabelled the quadratic coefficient  . Evaluating partition functions of this type is a typical exercise in one’s first QFT course, since the action now resembles that of a free massive scalar field, where
. Evaluating partition functions of this type is a typical exercise in one’s first QFT course, since the action now resembles that of a free massive scalar field, where  plays the role of the source (normally denoted
plays the role of the source (normally denoted 
 merely serves as a mnemonic, and
merely serves as a mnemonic, and  is the same field in momentum space. In the second equality, we’ve simply Fourier transformed back to real space by identifying the propagator
is the same field in momentum space. In the second equality, we’ve simply Fourier transformed back to real space by identifying the propagator
 . To see that this is indeed a correlation function,
. To see that this is indeed a correlation function, 
 ,
,

 , and use the identity
, and use the identity

 (not to be confused with the old name for the quadratic coefficient).
(not to be confused with the old name for the quadratic coefficient). and
and  , it is more illuminating to evaluate the integral via saddle point, rather than to preserve the exact form (which, as it turns out, can be expressed as a Bessel function). We thus exponentiate the
, it is more illuminating to evaluate the integral via saddle point, rather than to preserve the exact form (which, as it turns out, can be expressed as a Bessel function). We thus exponentiate the  factor to write
factor to write

 is given by
is given by

 near the critical point, we see that the correlation length diverges as
near the critical point, we see that the correlation length diverges as
 .
. 
 is the mean field from above, and in the last step we have used the scaling behaviours of
is the mean field from above, and in the last step we have used the scaling behaviours of  and
and  (the latter can be obtained by minimizing the quartic result for
(the latter can be obtained by minimizing the quartic result for  dimensions. (The case
dimensions. (The case  actually requires a more careful RG treatment due to the logarithmic divergence; see Tong’s
actually requires a more careful RG treatment due to the logarithmic divergence; see Tong’s  (here “
(here “ ” means “proportional to”; we’ll fix the coefficient later).
” means “proportional to”; we’ll fix the coefficient later). . Indeed, one of the most remarkable aspects of black holes is that the entropy scales with the area instead of the volume. Insofar as black holes represent the densest possible configuration of energy — and hence of information — this implies a drastic reduction in the (maximum) number of degrees of freedom in the universe, as I’ll discuss in more detail below. However, area laws for entanglement entropy are actually quite common; see for example [3] for a review. And while the ultimate source of black hole entropy (that is, the microscopic degrees of freedom it’s counting) is an ongoing topic of current research, the entanglement between the interior and exterior certainly plays an important role. But that’s a QFT calculation, whereas everything I’ve said so far is purely classical. Is there any way to see that the entropy must scale with
. Indeed, one of the most remarkable aspects of black holes is that the entropy scales with the area instead of the volume. Insofar as black holes represent the densest possible configuration of energy — and hence of information — this implies a drastic reduction in the (maximum) number of degrees of freedom in the universe, as I’ll discuss in more detail below. However, area laws for entanglement entropy are actually quite common; see for example [3] for a review. And while the ultimate source of black hole entropy (that is, the microscopic degrees of freedom it’s counting) is an ongoing topic of current research, the entanglement between the interior and exterior certainly plays an important role. But that’s a QFT calculation, whereas everything I’ve said so far is purely classical. Is there any way to see that the entropy must scale with  instead of
instead of 
 is the Schwarzschild radius and
is the Schwarzschild radius and  . For
. For  , the metric is static: the spatial components look the same for any value of
, the metric is static: the spatial components look the same for any value of  , and hence
, and hence  . This makes the
. This makes the  component positive and the
component positive and the  component negative, so that space and time switch roles in the black hole interior. Consequently, the “spatial” components are no longer static inside the black hole, since they will continue to evolve with
component negative, so that space and time switch roles in the black hole interior. Consequently, the “spatial” components are no longer static inside the black hole, since they will continue to evolve with  on that slice. But when space is curved, there are many different constant-
on that slice. But when space is curved, there are many different constant-
 is the determinant of the (induced) metric on
is the determinant of the (induced) metric on  , so we have
, so we have
 , and the integral vanishes. Thus the Schwarzschild metric would lead one to conclude that the “volume” of the black hole is zero! (Technically the integral is ill-defined at
, and the integral vanishes. Thus the Schwarzschild metric would lead one to conclude that the “volume” of the black hole is zero! (Technically the integral is ill-defined at  and taking the limit
and taking the limit 

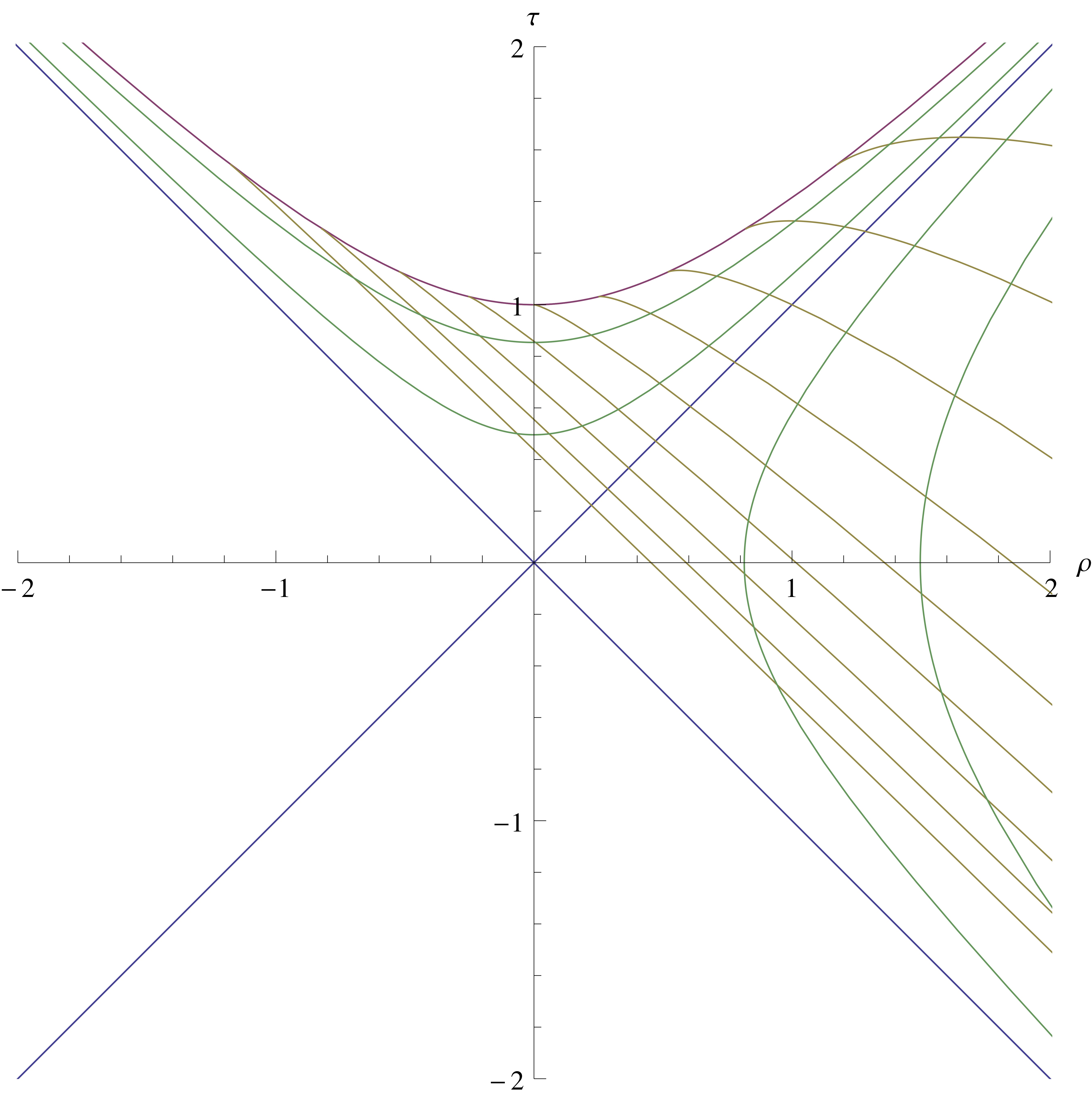

 is much greater than
is much greater than  (i.e., at late times), one finds [4]
(i.e., at late times), one finds [4]
 , for the same reasons we encountered when attempting to define volume above). Since the event horizon is a null-surface, the area is coordinate-invariant; fixing
, for the same reasons we encountered when attempting to define volume above). Since the event horizon is a null-surface, the area is coordinate-invariant; fixing 
 can be easily ruled out by considering a black hole merger [1]). And, while it’s a nice consistency check on the universe, it doesn’t really give any insight into why the degrees of freedom are ultimately bounded by the surface area, beyond the necessity-of-curved-space argument above.
can be easily ruled out by considering a black hole merger [1]). And, while it’s a nice consistency check on the universe, it doesn’t really give any insight into why the degrees of freedom are ultimately bounded by the surface area, beyond the necessity-of-curved-space argument above.
 ).
). , i.e., the answer to the yes-or-no question, “does the black hole contain the particle?” This line of reasoning yields
, i.e., the answer to the yes-or-no question, “does the black hole contain the particle?” This line of reasoning yields  ; not bad, given that we ignored QFT entirely!
; not bad, given that we ignored QFT entirely!
 is the internal energy,
is the internal energy,  is the pressure, and
is the pressure, and  , and
, and  where
where  is the heat.
is the heat.

 component diverges when
component diverges when  , which yields an inner (
, which yields an inner ( ) and outer (
) and outer ( ) horizon:
) horizon:

 , whereupon
, whereupon 

 , one obtains the analogue of the fundamental thermodynamic relation (11) for black holes:
, one obtains the analogue of the fundamental thermodynamic relation (11) for black holes: 
 and
and  are some functions of
are some functions of 

 . What about the other terms? As mentioned above, the
. What about the other terms? As mentioned above, the  term in (11) corresponds to the work done to the system. And as it turns out, there’s a way of extracting energy from a (charged, rotating) black hole, known as the
term in (11) corresponds to the work done to the system. And as it turns out, there’s a way of extracting energy from a (charged, rotating) black hole, known as the  is indeed the analogue of the work that the black hole could perform on some external system; i.e.,
is indeed the analogue of the work that the black hole could perform on some external system; i.e.,
 .
.
 in the expression for the surface gravity
in the expression for the surface gravity  -dimensional Schwarzschild geometry becomes
-dimensional Schwarzschild geometry becomes  , whereupon the temperature appears as a consequence of the periodicity in Euclidean time; see my
, whereupon the temperature appears as a consequence of the periodicity in Euclidean time; see my  , which can’t be Fourier transformed back to position space to yield anything localized near the horizon. In other words, near the horizon of a black hole, the meaning of “particles” employed by an external observer breaks down. The fact that black holes can radiate away energy means that if you stop throwing in matter, the black hole will slowly shrink, which seems to contradict Hawking’s area theorem above. The catch is that this theorem relies on the weak energy condition, which states that the matter density along every timelike vector field is non-negative; this is no longer necessarily true once quantum fluctuations are taking into account, so there’s no mathematical contradiction. It does however mean that our formulation of the “second law” of black hole thermodynamics was too naïve: the area (and hence entropy) of a black hole can decrease, but only by emitting Hawking radiation which increases the entropy of the environment by at least as much. This motivates us to introduce the generalized entropy
, which can’t be Fourier transformed back to position space to yield anything localized near the horizon. In other words, near the horizon of a black hole, the meaning of “particles” employed by an external observer breaks down. The fact that black holes can radiate away energy means that if you stop throwing in matter, the black hole will slowly shrink, which seems to contradict Hawking’s area theorem above. The catch is that this theorem relies on the weak energy condition, which states that the matter density along every timelike vector field is non-negative; this is no longer necessarily true once quantum fluctuations are taking into account, so there’s no mathematical contradiction. It does however mean that our formulation of the “second law” of black hole thermodynamics was too naïve: the area (and hence entropy) of a black hole can decrease, but only by emitting Hawking radiation which increases the entropy of the environment by at least as much. This motivates us to introduce the generalized entropy
 (10), and the second is the entropy of the thermal radiation. In full generality, the Second Law of (Black Hole) Thermodynamics is then statement is that the entropy (10) of all black holes, plus the entropy of the rest of the universe, never decreases:
(10), and the second is the entropy of the thermal radiation. In full generality, the Second Law of (Black Hole) Thermodynamics is then statement is that the entropy (10) of all black holes, plus the entropy of the rest of the universe, never decreases:
 is negative:
is negative:
 and hence the heat
and hence the heat  ). Consequently, throwing matter into a black hole to increase its size actually makes it cooler! Conversely, as the black hole emits Hawking radiation, its temperature increases, causing it to emit more radiation, and so on in a feedback loop that causes the black hole to get hotter and hotter as it shrinks away to nothing. (Precisely what happens in the final moments of a black hole’s lifespan is an open question, likely requiring a more developed theory of quantum gravity to answer. Here I’m going to take the majority view that it indeed evaporates away completely). Note that this means that whenever one speaks about black holes thermodynamically, one should use the microcanonical ensemble rather than the canonical ensemble, because the latter is unstable to any quantum fluctuation that changes the mass of the black hole.
). Consequently, throwing matter into a black hole to increase its size actually makes it cooler! Conversely, as the black hole emits Hawking radiation, its temperature increases, causing it to emit more radiation, and so on in a feedback loop that causes the black hole to get hotter and hotter as it shrinks away to nothing. (Precisely what happens in the final moments of a black hole’s lifespan is an open question, likely requiring a more developed theory of quantum gravity to answer. Here I’m going to take the majority view that it indeed evaporates away completely). Note that this means that whenever one speaks about black holes thermodynamically, one should use the microcanonical ensemble rather than the canonical ensemble, because the latter is unstable to any quantum fluctuation that changes the mass of the black hole. is indeed the physical (thermodynamic) temperature of a single black hole. In this sense, quantum effects were required to resolve the tension between the fact that the information-theoretic interpretation of entropy as the measure of possible internal microstates was applicable to a single black hole — and hence had physical significance — while the temperature had no meaningful physical interpretation in the non-radiating (classical) case. The combination of seemingly disparate regimes in the expression for the entropy (10) is not a coincidence, but represents a truly remarkable unification. It’s perhaps the first thing a successful theory of quantum gravity should be expected to explain.
is indeed the physical (thermodynamic) temperature of a single black hole. In this sense, quantum effects were required to resolve the tension between the fact that the information-theoretic interpretation of entropy as the measure of possible internal microstates was applicable to a single black hole — and hence had physical significance — while the temperature had no meaningful physical interpretation in the non-radiating (classical) case. The combination of seemingly disparate regimes in the expression for the entropy (10) is not a coincidence, but represents a truly remarkable unification. It’s perhaps the first thing a successful theory of quantum gravity should be expected to explain. . Initially,
. Initially,  , because our subsystem is empty. As the black hole evaporates,
, because our subsystem is empty. As the black hole evaporates,  (after normalizing): a maximal loss of information has occurred! This is the information paradox in a single graph. In sharp contrast, what quantum mechanics expects to happen is that after the halfway point in the black hole’s lifespan, the late-time radiation starts to purify the early-time radiation we’ve already collected, so the entropy curve should turn around and head back to 0 when the black hole disappears. This is illustrated in the figure below, from Page’s paper [11]. (The lack of symmetry in the upwards and downwards parts is due to the fact that the emission of different particles (in this calculation, just photons and gravitons) affect the change in the black hole entropy and the change in the radiation entropy slightly differently. The turnover isn’t at exactly half the lifetime either, but rather around
(after normalizing): a maximal loss of information has occurred! This is the information paradox in a single graph. In sharp contrast, what quantum mechanics expects to happen is that after the halfway point in the black hole’s lifespan, the late-time radiation starts to purify the early-time radiation we’ve already collected, so the entropy curve should turn around and head back to 0 when the black hole disappears. This is illustrated in the figure below, from Page’s paper [11]. (The lack of symmetry in the upwards and downwards parts is due to the fact that the emission of different particles (in this calculation, just photons and gravitons) affect the change in the black hole entropy and the change in the radiation entropy slightly differently. The turnover isn’t at exactly half the lifetime either, but rather around  .)
.)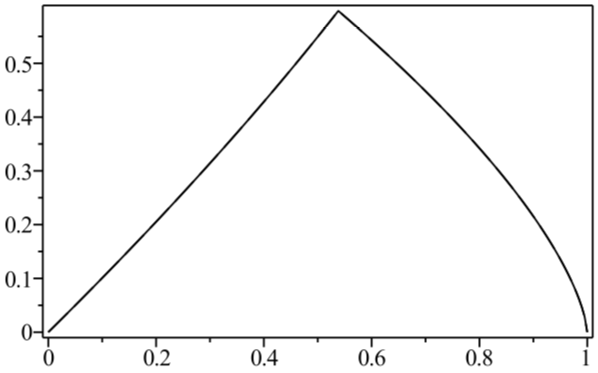
 . For example, in a system with 100 spins, there are
. For example, in a system with 100 spins, there are  possible states, so
possible states, so  and
and  , i.e., the system contains 100 bits of information. One can crudely think of quantum field theory as a continuum theory with a harmonic oscillator at every spacetime point; a single harmonic oscillator already has
, i.e., the system contains 100 bits of information. One can crudely think of quantum field theory as a continuum theory with a harmonic oscillator at every spacetime point; a single harmonic oscillator already has  , so one would expect an infinite number of degrees of freedom for any region. However, one can’t localize more than a Planck energy
, so one would expect an infinite number of degrees of freedom for any region. However, one can’t localize more than a Planck energy  into a Planck cube
into a Planck cube  without forming a black hole, which provides an ultra-violet (UV) cutoff on the spectrum. And since any finite volume imposes an infra-red (IR) cutoff, we can take the degrees of freedom in field theory to scale like the volume of the region, with one oscillator per Planck cell. In other words, we think of space as a grid with lattice spacing
without forming a black hole, which provides an ultra-violet (UV) cutoff on the spectrum. And since any finite volume imposes an infra-red (IR) cutoff, we can take the degrees of freedom in field theory to scale like the volume of the region, with one oscillator per Planck cell. In other words, we think of space as a grid with lattice spacing  ; the total number of oscillators thus scales like the volume
; the total number of oscillators thus scales like the volume  and
and  . Thus, since
. Thus, since  ,
,  , and we expect entropy to scale with volume just as in classical mechanics.
, and we expect entropy to scale with volume just as in classical mechanics. , not
, not  , so the energy can’t scale with the volume: the vast majority of the states which QFT would naïvely allow can’t be reached in a gravitational theory, because we form a black hole when we’ve excited only a small fraction of them. The maximum number of states we can excite is
, so the energy can’t scale with the volume: the vast majority of the states which QFT would naïvely allow can’t be reached in a gravitational theory, because we form a black hole when we’ve excited only a small fraction of them. The maximum number of states we can excite is  (in Planck units).
(in Planck units). . If we then collapse that region into a black hole, the Hilbert space dimension would have to suddenly drop to
. If we then collapse that region into a black hole, the Hilbert space dimension would have to suddenly drop to  . It would then be impossible to recover the initial state from the final state (e.g., after allowing the black hole to evaporate). Thus in order to preserve unitarity, the dimension of the Hilbert space must have been
. It would then be impossible to recover the initial state from the final state (e.g., after allowing the black hole to evaporate). Thus in order to preserve unitarity, the dimension of the Hilbert space must have been  ), homogeneous, isotropic space with some average entropy density
), homogeneous, isotropic space with some average entropy density 
 . The proper way to generalize black hole entropy to the sort of bound we want is to recall that the area of the event horizon is a null hypersurface, and it is the formulation in terms of such light-sheets which is consistent with all known examples. This is known as the covariant entropy bound, and states that the entropy on (or rather, contained within) non-expanding light-sheets of some spacetime codimension-2 surface
. The proper way to generalize black hole entropy to the sort of bound we want is to recall that the area of the event horizon is a null hypersurface, and it is the formulation in terms of such light-sheets which is consistent with all known examples. This is known as the covariant entropy bound, and states that the entropy on (or rather, contained within) non-expanding light-sheets of some spacetime codimension-2 surface ![\displaystyle \langle\Psi|\mathcal{O}(t,\mathbf{x})\tilde{\mathcal{O}}(t',\mathbf{x}')|\Psi\rangle =Z^{-1}\mathrm{tr}\left[e^{-\beta H}\mathcal{O}(t,\mathbf{x})\mathcal{O}(t'+i\beta/2,\mathbf{x}')\right]~, \ \ \ \ \ (1)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Clangle%5CPsi%7C%5Cmathcal%7BO%7D%28t%2C%5Cmathbf%7Bx%7D%29%5Ctilde%7B%5Cmathcal%7BO%7D%7D%28t%27%2C%5Cmathbf%7Bx%7D%27%29%7C%5CPsi%5Crangle+%3DZ%5E%7B-1%7D%5Cmathrm%7Btr%7D%5Cleft%5Be%5E%7B-%5Cbeta+H%7D%5Cmathcal%7BO%7D%28t%2C%5Cmathbf%7Bx%7D%29%5Cmathcal%7BO%7D%28t%27%2Bi%5Cbeta%2F2%2C%5Cmathbf%7Bx%7D%27%29%5Cright%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%281%29&bg=ffffff&fg=000000&s=0&c=20201002)
 and
and 
 in exterior region
in exterior region  and
and  in exterior region
in exterior region  . Note that, modulo possible UV divergences at the origin, either half serves as a complete Cauchy slice if we restrict our inquiries to the associated exterior region. But if we wish to reconstruct states in the interior (henceforth just
. Note that, modulo possible UV divergences at the origin, either half serves as a complete Cauchy slice if we restrict our inquiries to the associated exterior region. But if we wish to reconstruct states in the interior (henceforth just  , since we don’t care about
, since we don’t care about  ), then we need the entire slice. Pictorially, one can see this from the fact that only the left-moving modes from region
), then we need the entire slice. Pictorially, one can see this from the fact that only the left-moving modes from region 
![\displaystyle \mathrm{d} s^2=\frac{1}{z^2}\left[-h(z)\mathrm{d} t^2+\mathrm{d} z^2+\mathrm{d}\mathbf{x}^2\right]~, \quad\quad h(z)\equiv1-\left(\frac{z}{z_0}\right)^d~. \ \ \ \ \ (3)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathrm%7Bd%7D+s%5E2%3D%5Cfrac%7B1%7D%7Bz%5E2%7D%5Cleft%5B-h%28z%29%5Cmathrm%7Bd%7D+t%5E2%2B%5Cmathrm%7Bd%7D+z%5E2%2B%5Cmathrm%7Bd%7D%5Cmathbf%7Bx%7D%5E2%5Cright%5D%7E%2C+%5Cquad%5Cquad+h%28z%29%5Cequiv1-%5Cleft%28%5Cfrac%7Bz%7D%7Bz_0%7D%5Cright%29%5Ed%7E.+%5C+%5C+%5C+%5C+%5C+%283%29&bg=ffffff&fg=000000&s=0&c=20201002)
 , and the horizon is at
, and the horizon is at  . We work in
. We work in  spacetime dimensions, so
spacetime dimensions, so  -dimensional vector representing the transverse coordinates. Note that we’ve set the AdS radius to 1. Substituting the usual plane-wave ansatz
-dimensional vector representing the transverse coordinates. Note that we’ve set the AdS radius to 1. Substituting the usual plane-wave ansatz
 , and hence two linearly independent solutions.
, and hence two linearly independent solutions.  . Note that we do not impose boundary conditions at the horizon. Naïvely, one might have thought to impose ingoing boundary conditions there; however, as remarked in [1], this precludes the existence of real
. Note that we do not impose boundary conditions at the horizon. Naïvely, one might have thought to impose ingoing boundary conditions there; however, as remarked in [1], this precludes the existence of real  . More intuitively, I think of this as simply the statement that the black hole is evaporating, so we should allow the possibility for outgoing modes as well. (That is, assuming a large black hole in AdS, the black hole is in thermal equilibrium with the surrounding environment, so the outgoing and ingoing fluxes are precisely matched, and it maintains constant size). The expression for
. More intuitively, I think of this as simply the statement that the black hole is evaporating, so we should allow the possibility for outgoing modes as well. (That is, assuming a large black hole in AdS, the black hole is in thermal equilibrium with the surrounding environment, so the outgoing and ingoing fluxes are precisely matched, and it maintains constant size). The expression for ![\displaystyle \phi_I(t,\mathbf{x},z)=\int_{\omega>0}\frac{\mathrm{d}\omega\mathrm{d}^{d-1}\mathbf{k}}{\sqrt{2\omega}(2\pi)^d}\,\bigg[ a_{\omega,\mathbf{k}}\,f_{\omega,\mathbf{k}}(t,\mathbf{x},z)+\mathrm{h.c.}\bigg]~, \ \ \ \ \ (5)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cphi_I%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%3D%5Cint_%7B%5Comega%3E0%7D%5Cfrac%7B%5Cmathrm%7Bd%7D%5Comega%5Cmathrm%7Bd%7D%5E%7Bd-1%7D%5Cmathbf%7Bk%7D%7D%7B%5Csqrt%7B2%5Comega%7D%282%5Cpi%29%5Ed%7D%5C%2C%5Cbigg%5B+a_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%5C%2Cf_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%2B%5Cmathrm%7Bh.c.%7D%5Cbigg%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%285%29&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle [a_{\omega,\mathbf{k}},a^\dagger_{\omega',\mathbf{k}'}]=\delta(\omega-\omega')\delta^{d-1}(\mathbf{k}-\mathbf{k}')~. \ \ \ \ \ (6)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Ba_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%2Ca%5E%5Cdagger_%7B%5Comega%27%2C%5Cmathbf%7Bk%7D%27%7D%5D%3D%5Cdelta%28%5Comega-%5Comega%27%29%5Cdelta%5E%7Bd-1%7D%28%5Cmathbf%7Bk%7D-%5Cmathbf%7Bk%7D%27%29%7E.+%5C+%5C+%5C+%5C+%5C+%286%29&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle \phi_{III}(t,\mathbf{x},z)=\int_{\omega>0}\frac{\mathrm{d}\omega\mathrm{d}^{d-1}\mathbf{k}}{\sqrt{2\omega}(2\pi)^d}\,\bigg[\tilde a_{\omega,\mathbf{k}}\,g_{\omega,\mathbf{k}}(t,\mathbf{x},z)+\mathrm{h.c.}\bigg]~, \ \ \ \ \ (7)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cphi_%7BIII%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%3D%5Cint_%7B%5Comega%3E0%7D%5Cfrac%7B%5Cmathrm%7Bd%7D%5Comega%5Cmathrm%7Bd%7D%5E%7Bd-1%7D%5Cmathbf%7Bk%7D%7D%7B%5Csqrt%7B2%5Comega%7D%282%5Cpi%29%5Ed%7D%5C%2C%5Cbigg%5B%5Ctilde+a_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%5C%2Cg_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%2B%5Cmathrm%7Bh.c.%7D%5Cbigg%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%287%29&bg=ffffff&fg=000000&s=0&c=20201002)
 commute with all
commute with all  by construction.
by construction.![\displaystyle \phi^I_{\mathrm{CFT}}(t,\mathbf{x},z)=\int_{\omega>0}\frac{\mathrm{d}\omega\mathrm{d}^{d-1}\mathbf{k}}{(2\pi)^d}\,\bigg[\mathcal{O}_{\omega,\mathbf{k}}\,f_{\omega,\mathbf{k}}(t,\mathbf{x},z)+\mathcal{O}^\dagger_{\omega,\mathbf{k}}f^*_{\omega,\mathbf{k}}(t,\mathbf{x},z)\bigg]~, \ \ \ \ \ (8)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cphi%5EI_%7B%5Cmathrm%7BCFT%7D%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%3D%5Cint_%7B%5Comega%3E0%7D%5Cfrac%7B%5Cmathrm%7Bd%7D%5Comega%5Cmathrm%7Bd%7D%5E%7Bd-1%7D%5Cmathbf%7Bk%7D%7D%7B%282%5Cpi%29%5Ed%7D%5C%2C%5Cbigg%5B%5Cmathcal%7BO%7D_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%5C%2Cf_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%2B%5Cmathcal%7BO%7D%5E%5Cdagger_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7Df%5E%2A_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%5Cbigg%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%288%29&bg=ffffff&fg=000000&s=0&c=20201002)
 which act as creation operators of light primary fields), behaves like a local operator in the bulk. Note that from the perspective of the CFT,
which act as creation operators of light primary fields), behaves like a local operator in the bulk. Note that from the perspective of the CFT, 
 local bulk fields” is the same.
local bulk fields” is the same. living in the left CFT:
living in the left CFT:![\displaystyle \phi^{III}_{\mathrm{CFT}}(t,\mathbf{x},z)=\int_{\omega>0}\frac{\mathrm{d}\omega\mathrm{d}^{d-1}\mathbf{k}}{(2\pi)^d}\,\bigg[\tilde{\mathcal{O}}_{\omega,\mathbf{k}}\,f_{\omega,\mathbf{k}}(t,\mathbf{x},z)+\tilde{\mathcal{O}}^\dagger_{\omega,\mathbf{k}}f^*_{\omega,\mathbf{k}}(t,\mathbf{x},z)\bigg]~. \ \ \ \ \ (10)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cphi%5E%7BIII%7D_%7B%5Cmathrm%7BCFT%7D%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%3D%5Cint_%7B%5Comega%3E0%7D%5Cfrac%7B%5Cmathrm%7Bd%7D%5Comega%5Cmathrm%7Bd%7D%5E%7Bd-1%7D%5Cmathbf%7Bk%7D%7D%7B%282%5Cpi%29%5Ed%7D%5C%2C%5Cbigg%5B%5Ctilde%7B%5Cmathcal%7BO%7D%7D_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%5C%2Cf_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%2B%5Ctilde%7B%5Cmathcal%7BO%7D%7D%5E%5Cdagger_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7Df%5E%2A_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%5Cbigg%5D%7E.+%5C+%5C+%5C+%5C+%5C+%2810%29&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle \phi^{II}_{\mathrm{CFT}}(t,\mathbf{x},z)=\int_{\omega>0}\frac{\mathrm{d}\omega\mathrm{d}^{d-1}\mathbf{k}}{(2\pi)^d}\,\bigg[\mathcal{O}_{\omega,\mathbf{k}}\,g^{(1)}_{\omega,\mathbf{k}}(t,\mathbf{x},z)+\tilde{\mathcal{O}}_{\omega,\mathbf{k}}g^{(2)}_{\omega,\mathbf{k}}(t,\mathbf{x},z)+\mathrm{h.c}\bigg]~, \ \ \ \ \ (11)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cphi%5E%7BII%7D_%7B%5Cmathrm%7BCFT%7D%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%3D%5Cint_%7B%5Comega%3E0%7D%5Cfrac%7B%5Cmathrm%7Bd%7D%5Comega%5Cmathrm%7Bd%7D%5E%7Bd-1%7D%5Cmathbf%7Bk%7D%7D%7B%282%5Cpi%29%5Ed%7D%5C%2C%5Cbigg%5B%5Cmathcal%7BO%7D_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%5C%2Cg%5E%7B%281%29%7D_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%2B%5Ctilde%7B%5Cmathcal%7BO%7D%7D_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7Dg%5E%7B%282%29%7D_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%28t%2C%5Cmathbf%7Bx%7D%2Cz%29%2B%5Cmathrm%7Bh.c%7D%5Cbigg%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2811%29&bg=ffffff&fg=000000&s=0&c=20201002)

 of the CFT set by the mass of the black hole. This implies that correlation functions of operators
of the CFT set by the mass of the black hole. This implies that correlation functions of operators  may be computed as thermal expectation values in their (mixed) half of the total Hilbert space, i.e.,
may be computed as thermal expectation values in their (mixed) half of the total Hilbert space, i.e., ![\displaystyle \langle\mathrm{TFD}|\mathcal{O}(t_1,\mathbf{x}_1)\ldots\mathcal{O}(t_n,\mathbf{x}_n)|\mathrm{TFD}\rangle =Z^{-1}_\beta\mathrm{tr}\left[e^{-\beta H}\mathcal{O}(t_1,\mathbf{x}_1)\ldots\mathcal{O}(t_n,\mathbf{x}_n)\right]~. \ \ \ \ \ (13)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Clangle%5Cmathrm%7BTFD%7D%7C%5Cmathcal%7BO%7D%28t_1%2C%5Cmathbf%7Bx%7D_1%29%5Cldots%5Cmathcal%7BO%7D%28t_n%2C%5Cmathbf%7Bx%7D_n%29%7C%5Cmathrm%7BTFD%7D%5Crangle+%3DZ%5E%7B-1%7D_%5Cbeta%5Cmathrm%7Btr%7D%5Cleft%5Be%5E%7B-%5Cbeta+H%7D%5Cmathcal%7BO%7D%28t_1%2C%5Cmathbf%7Bx%7D_1%29%5Cldots%5Cmathcal%7BO%7D%28t_n%2C%5Cmathbf%7Bx%7D_n%29%5Cright%5D%7E.+%5C+%5C+%5C+%5C+%5C+%2813%29&bg=ffffff&fg=000000&s=0&c=20201002)
 up to
up to  corrections. The reason this is the “correct” prescription is that it’s the only one which
corrections. The reason this is the “correct” prescription is that it’s the only one which  ? In the two-sided case, we can simply compute this correlator in the pure state
? In the two-sided case, we can simply compute this correlator in the pure state 
![\displaystyle \langle\mathrm{TFD}|\mathcal{O}(t_1,\mathbf{x}_1)\ldots\tilde{\mathcal{O}}(t_n,\mathbf{x}_n)|\mathrm{TFD}\rangle =Z^{-1}_\beta\mathrm{tr}\left[e^{-\beta H}\mathcal{O}(t_1,\mathbf{x}_1)\ldots\mathcal{O}_{\omega,\mathbf{k}}(t_n+i\beta/2,\mathbf{x}_n)\right]~, \ \ \ \ \ (15)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Clangle%5Cmathrm%7BTFD%7D%7C%5Cmathcal%7BO%7D%28t_1%2C%5Cmathbf%7Bx%7D_1%29%5Cldots%5Ctilde%7B%5Cmathcal%7BO%7D%7D%28t_n%2C%5Cmathbf%7Bx%7D_n%29%7C%5Cmathrm%7BTFD%7D%5Crangle+%3DZ%5E%7B-1%7D_%5Cbeta%5Cmathrm%7Btr%7D%5Cleft%5Be%5E%7B-%5Cbeta+H%7D%5Cmathcal%7BO%7D%28t_1%2C%5Cmathbf%7Bx%7D_1%29%5Cldots%5Cmathcal%7BO%7D_%7B%5Comega%2C%5Cmathbf%7Bk%7D%7D%28t_n%2Bi%5Cbeta%2F2%2C%5Cmathbf%7Bx%7D_n%29%5Cright%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2815%29&bg=ffffff&fg=000000&s=0&c=20201002)

 denotes the variational or “action parameters” of the model, so named because they parametrize the action of the brain on its substrate and surroundings. That is, the only way in which the system can change the distribution is by acting to change its sensory inputs. Friston denotes this dependency by
denotes the variational or “action parameters” of the model, so named because they parametrize the action of the brain on its substrate and surroundings. That is, the only way in which the system can change the distribution is by acting to change its sensory inputs. Friston denotes this dependency by  (with different variables), but as alluded above, I will keep to the present notation to avoid conflating state/parameter spaces.
(with different variables), but as alluded above, I will keep to the present notation to avoid conflating state/parameter spaces. is then a map from the space of sensory inputs
is then a map from the space of sensory inputs  (as modelled by the brain). As in the case of
(as modelled by the brain). As in the case of  . Instead, we construct a new distribution
. Instead, we construct a new distribution  for the conditional probability of environment states
for the conditional probability of environment states 

 denote the conditional distributions
denote the conditional distributions  is the energy or hamiltonian for the ensemble
is the energy or hamiltonian for the ensemble  ), and
), and  is the entropy of
is the entropy of  with the ensemble density
with the ensemble density  , where — unlike in the case of
, where — unlike in the case of  — we have denoted the variational parameters
— we have denoted the variational parameters  ) get renormalized after marginalizing over some degrees of freedom (here,
) get renormalized after marginalizing over some degrees of freedom (here, 
 to distinguish this from
to distinguish this from  (no vertical bar) denotes that expectation values are computed with respect to the distribution
(no vertical bar) denotes that expectation values are computed with respect to the distribution  as the log-likelihood of sensory inputs given the state of the environment, minus an error term that quantifies how far the brain’s internal model of the world
as the log-likelihood of sensory inputs given the state of the environment, minus an error term that quantifies how far the brain’s internal model of the world  for some energy
for some energy  and entropy
and entropy  ; the reason for this general form involves a
; the reason for this general form involves a  . As explained above,
. As explained above,  , we can re-arrange the expression for the free energy to isolate this dependence in a single Kullback-Leibler term:
, we can re-arrange the expression for the free energy to isolate this dependence in a single Kullback-Leibler term:
 . This form of the expression shows clearly that minimization with respect to
. This form of the expression shows clearly that minimization with respect to  in (4) (i.e., zero Kullback-Leibler divergence (2)), whereupon the free energy reduces to the negative log-likelihood of sensory inputs,
in (4) (i.e., zero Kullback-Leibler divergence (2)), whereupon the free energy reduces to the negative log-likelihood of sensory inputs, 
 . Since real-world models are generally non-linear in their inputs however, invertibility is not something one expects to encounter in realistic inference machines (i.e., brains). Indeed, our brains evolved under strict energetic and space constraints; there simply isn’t enough processing power to brute-force the problem by using dedicated feed-forward networks for all our recognition needs. The other important exception is when the recognition process is purely deterministic. In this case one replaces
. Since real-world models are generally non-linear in their inputs however, invertibility is not something one expects to encounter in realistic inference machines (i.e., brains). Indeed, our brains evolved under strict energetic and space constraints; there simply isn’t enough processing power to brute-force the problem by using dedicated feed-forward networks for all our recognition needs. The other important exception is when the recognition process is purely deterministic. In this case one replaces  , so that upon performing the summation, the inferred state
, so that upon performing the summation, the inferred state 
 . Note that the invertible case, (6), corresponds to maximum likelihood estimation (MLE), while the deterministic case (7) corresponds to so-called maximum a posteriori estimation (MAP), the only difference being that the latter includes a weighting based on the prior distribution
. Note that the invertible case, (6), corresponds to maximum likelihood estimation (MLE), while the deterministic case (7) corresponds to so-called maximum a posteriori estimation (MAP), the only difference being that the latter includes a weighting based on the prior distribution  . Neither requires the conditional distribution
. Neither requires the conditional distribution  , where 0 is the bottom-most layer and
, where 0 is the bottom-most layer and  denotes sensory data at the corresponding layer; i.e.,
denotes sensory data at the corresponding layer; i.e.,  corresponds to the propagated input signals after all previous levels of processing. Similarly, let
corresponds to the propagated input signals after all previous levels of processing. Similarly, let 
 implicitly depends on the knowledge of the state at all previous levels,
implicitly depends on the knowledge of the state at all previous levels,  . For present purposes, this can be identified with
. For present purposes, this can be identified with  , since at the bottom-most level of the hierarchy, there’s no difference between the raw sensory data and the inferred state of the world (ignoring whatever intralayer processing might take place). In this (empirical Bayesian) way, the brain self-consistently builds up higher priors from states at lower levels.
, since at the bottom-most level of the hierarchy, there’s no difference between the raw sensory data and the inferred state of the world (ignoring whatever intralayer processing might take place). In this (empirical Bayesian) way, the brain self-consistently builds up higher priors from states at lower levels. . The total energy function is
. The total energy function is 
 . Note that there are no intra-layer couplings, and that I’ve stacked the layers so that the visible layer
. Note that there are no intra-layer couplings, and that I’ve stacked the layers so that the visible layer  . There’s an obvious Bayesian parallel here: we low-energy beings don’t have access to complete information about the UV, so the visible units are naturally identified with IR degrees of freedom, and indeed I’ll use these terms interchangeably throughout.
. There’s an obvious Bayesian parallel here: we low-energy beings don’t have access to complete information about the UV, so the visible units are naturally identified with IR degrees of freedom, and indeed I’ll use these terms interchangeably throughout.![\displaystyle p(x,y,z)=Z^{-1}e^{-\beta H(x,y,z)}~, \quad\quad Z[\beta]=\prod_{i=1}^n\sum_{x_i=\pm1}\int\!\mathrm{d}^my\mathrm{d}^pz\,e^{-\beta H(x,y,z)}~, \ \ \ \ \ (2)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+p%28x%2Cy%2Cz%29%3DZ%5E%7B-1%7De%5E%7B-%5Cbeta+H%28x%2Cy%2Cz%29%7D%7E%2C+%5Cquad%5Cquad+Z%5B%5Cbeta%5D%3D%5Cprod_%7Bi%3D1%7D%5En%5Csum_%7Bx_i%3D%5Cpm1%7D%5Cint%5C%21%5Cmathrm%7Bd%7D%5Emy%5Cmathrm%7Bd%7D%5Epz%5C%2Ce%5E%7B-%5Cbeta+H%28x%2Cy%2Cz%29%7D%7E%2C+%5C+%5C+%5C+%5C+%5C+%282%29&bg=ffffff&fg=000000&s=0&c=20201002)
 , and similarly for
, and similarly for  and
and 
 such that
such that 


 and
and  . We therefore obtain
. We therefore obtain 


 with respect to this distribution is then
with respect to this distribution is then 
 , we have
, we have

 , we then see that the effect of the marginalizing out UV (i.e., hidden) degrees of freedom is to induce higher-order couplings between the IR (i.e., visible) units, with the coefficients of the interaction weighted by the associated cumulant:
, we then see that the effect of the marginalizing out UV (i.e., hidden) degrees of freedom is to induce higher-order couplings between the IR (i.e., visible) units, with the coefficients of the interaction weighted by the associated cumulant: 
 (the variance) vanish, whereupon (13) reduces to (7) above.
(the variance) vanish, whereupon (13) reduces to (7) above.
 and
and  . We therefore obtain
. We therefore obtain![\displaystyle \begin{aligned} p(x)&=Z^{-1}\sqrt{\frac{(2\pi)^m}{\beta\left(1-|B'|\right)}}\mathrm{exp}\left[-\beta\left( f(\beta)-\mathbf{a}\mathbf{x}+\frac{1}{2}\mathbf{x}^\mathrm{T} A\left(\mathbf{1}-B'\right)^{-1}A^\mathrm{T}\mathbf{x}\right)\right]\\ &=Z^{-1}\sqrt{\frac{(2\pi)^m}{\beta\left(1-|B'|\right)}}\mathrm{exp}\left[-\beta\left( f(\beta)-\mathbf{a}\mathbf{x}+\frac{1}{2}\mathbf{x}^\mathrm{T} A'\mathbf{x}\right)\right] \end{aligned} \ \ \ \ \ (15)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+p%28x%29%26%3DZ%5E%7B-1%7D%5Csqrt%7B%5Cfrac%7B%282%5Cpi%29%5Em%7D%7B%5Cbeta%5Cleft%281-%7CB%27%7C%5Cright%29%7D%7D%5Cmathrm%7Bexp%7D%5Cleft%5B-%5Cbeta%5Cleft%28+f%28%5Cbeta%29-%5Cmathbf%7Ba%7D%5Cmathbf%7Bx%7D%2B%5Cfrac%7B1%7D%7B2%7D%5Cmathbf%7Bx%7D%5E%5Cmathrm%7BT%7D+A%5Cleft%28%5Cmathbf%7B1%7D-B%27%5Cright%29%5E%7B-1%7DA%5E%5Cmathrm%7BT%7D%5Cmathbf%7Bx%7D%5Cright%29%5Cright%5D%5C%5C+%26%3DZ%5E%7B-1%7D%5Csqrt%7B%5Cfrac%7B%282%5Cpi%29%5Em%7D%7B%5Cbeta%5Cleft%281-%7CB%27%7C%5Cright%29%7D%7D%5Cmathrm%7Bexp%7D%5Cleft%5B-%5Cbeta%5Cleft%28+f%28%5Cbeta%29-%5Cmathbf%7Ba%7D%5Cmathbf%7Bx%7D%2B%5Cfrac%7B1%7D%7B2%7D%5Cmathbf%7Bx%7D%5E%5Cmathrm%7BT%7D+A%27%5Cmathbf%7Bx%7D%5Cright%29%5Cright%5D+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2815%29&bg=ffffff&fg=000000&s=0&c=20201002)
 . As before, we then define
. As before, we then define  such that
such that 


 and
and  are given in (8).
are given in (8). and
and  . This will be of the form (10), where in this case we need to choose
. This will be of the form (10), where in this case we need to choose  , so that
, so that
 , the inverse matrix
, the inverse matrix  is also invariant under the transpose; at this stage of exploration, I’m being quite cavalier about questions of existence). Thus the hamiltonian of visible units may be written
is also invariant under the transpose; at this stage of exploration, I’m being quite cavalier about questions of existence). Thus the hamiltonian of visible units may be written
 as above. Since the prior with which these cumulants are computed is again Gaussian, only the second cumulant survives in the expansion, and we indeed recover (17).
as above. Since the prior with which these cumulants are computed is again Gaussian, only the second cumulant survives in the expansion, and we indeed recover (17).
 for
for  for
for 
 between visible (low-energy) degrees of freedom, for example, does not depend on which distribution we use to compute the expectation value, so long as the energy scale thereof is at or above the scale set by the inverse lattice spacing of
between visible (low-energy) degrees of freedom, for example, does not depend on which distribution we use to compute the expectation value, so long as the energy scale thereof is at or above the scale set by the inverse lattice spacing of 
 . In this analogy, tracing out
. In this analogy, tracing out  , which is again one-dimensional. When one speaks of deep “learning” however, one views the network as two-dimensional, and “dynamics” refers to the changing values of the couplings as the network attempts to minimize the cost function. In short, RG lies in the fact that the couplings at each level in (21) encode the
, which is again one-dimensional. When one speaks of deep “learning” however, one views the network as two-dimensional, and “dynamics” refers to the changing values of the couplings as the network attempts to minimize the cost function. In short, RG lies in the fact that the couplings at each level in (21) encode the  at this level. Accordingly, [8] instead replace (2) with
at this level. Accordingly, [8] instead replace (2) with 
 is the so-called reduced (i.e., dimensionless) hamiltonian, cf. the reduced/dimensionless free energy
is the so-called reduced (i.e., dimensionless) hamiltonian, cf. the reduced/dimensionless free energy  in the
in the  runs over all the degrees of freedom in the theory, which are all UV/hidden variables at the present level.
runs over all the degrees of freedom in the theory, which are all UV/hidden variables at the present level. already). More confusingly however, their use of the terminology “visible” and “hidden” is backwards with respect to the RG analogy here. In particular, they coarse-grain a block of “visible” units into a single “hidden” unit. For reasons which should by now be obvious, I will instead stick to the natural Bayesian identifications above, in order to preserve the analogy with standard coarse-graining in RG.
already). More confusingly however, their use of the terminology “visible” and “hidden” is backwards with respect to the RG analogy here. In particular, they coarse-grain a block of “visible” units into a single “hidden” unit. For reasons which should by now be obvious, I will instead stick to the natural Bayesian identifications above, in order to preserve the analogy with standard coarse-graining in RG. , and then writing the new distribution
, and then writing the new distribution  in the canonical form (24). In Bayesian terms, we need to marginalize over the information about
in the canonical form (24). In Bayesian terms, we need to marginalize over the information about  , except that unlike in my simple example above, we don’t want to make any assumptions about the form of
, except that unlike in my simple example above, we don’t want to make any assumptions about the form of  . So we instead express the integral — or rather, the discrete sum over lattice sites — in terms of the conditional distribution
. So we instead express the integral — or rather, the discrete sum over lattice sites — in terms of the conditional distribution  :
:
 ,
,  . Denoting the new dimensionless hamiltonian
. Denoting the new dimensionless hamiltonian  , with
, with  ,
,  , we therefore have
, we therefore have 
 into a piece containing only intra-block terms,
into a piece containing only intra-block terms,  (that is, interactions solely among the set of hidden units which is to be coarse-grained into a single visible unit), and a piece containing the remaining, inter-block terms,
(that is, interactions solely among the set of hidden units which is to be coarse-grained into a single visible unit), and a piece containing the remaining, inter-block terms,  (that is, interactions between different aforementioned sets of hidden units).
(that is, interactions between different aforementioned sets of hidden units). , such that
, such that  (note that since
(note that since  , this implies
, this implies  degrees of freedom
degrees of freedom  per block). To each
per block). To each  , we associate a visible unit
, we associate a visible unit  , into which the constituent UV variables
, into which the constituent UV variables  relative to [8]). Then translation invariance implies
relative to [8]). Then translation invariance implies
 denotes a single intra-block term of the hamiltonian. With this notation in hand, (26) becomes
denotes a single intra-block term of the hamiltonian. With this notation in hand, (26) becomes 
 , where
, where  . Given the underlying factorization of the total Hilbert space, we furthermore suppose that the distribution of all intra-block contributions can be written
. Given the underlying factorization of the total Hilbert space, we furthermore suppose that the distribution of all intra-block contributions can be written  , so that
, so that  . This implies that
. This implies that
 into (28), from which the remaining manipulations are straightforward: we identify
into (28), from which the remaining manipulations are straightforward: we identify
 (again by translation invariance), whereupon we have
(again by translation invariance), whereupon we have
 . Finally, by taking the log, we obtain
. Finally, by taking the log, we obtain 
 accounts for the normalization factor
accounts for the normalization factor  gives the contribution from the un-marginalized variables
gives the contribution from the un-marginalized variables  ; and the log of the expectation values is the contribution from the UV cumulants, cf.
; and the log of the expectation values is the contribution from the UV cumulants, cf.  therein:
therein:
 becomes the dimensionless energy
becomes the dimensionless energy  , so the
, so the  relative to the usual energetic moments in
relative to the usual energetic moments in 
 , and the expectation values in the generating functions are computed with respect to
, and the expectation values in the generating functions are computed with respect to 
 denotes the expectation value for the corresponding distribution. (As a technical caveat: in some cases, the moments — and correspondingly,
denotes the expectation value for the corresponding distribution. (As a technical caveat: in some cases, the moments — and correspondingly,  — may not exist, in which case one can resort to the characteristic function instead). By series expanding the exponential, we have
— may not exist, in which case one can resort to the characteristic function instead). By series expanding the exponential, we have 
 is the
is the  , i.e.,
, i.e., 

 is the
is the  :
: 
 is
is ![\displaystyle p_i\equiv p(E_i)=\frac{1}{Z[\beta]}e^{-\beta E_i}~, \quad\quad \sum\nolimits_ip_i=1~. \ \ \ \ \ (6)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+p_i%5Cequiv+p%28E_i%29%3D%5Cfrac%7B1%7D%7BZ%5B%5Cbeta%5D%7De%5E%7B-%5Cbeta+E_i%7D%7E%2C+%5Cquad%5Cquad+%5Csum%5Cnolimits_ip_i%3D1%7E.+%5C+%5C+%5C+%5C+%5C+%286%29&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle M_E(t)=\langle e^{tE}\rangle=\sum_i p(E_i)e^{tE_i} =\frac{1}{Z[\beta]}\sum_ie^{-(\beta\!-\!t)E_i} =\frac{Z[\beta-t]}{Z[\beta]}~. \ \ \ \ \ (7)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+M_E%28t%29%3D%5Clangle+e%5E%7BtE%7D%5Crangle%3D%5Csum_i+p%28E_i%29e%5E%7BtE_i%7D+%3D%5Cfrac%7B1%7D%7BZ%5B%5Cbeta%5D%7D%5Csum_ie%5E%7B-%28%5Cbeta%5C%21-%5C%21t%29E_i%7D+%3D%5Cfrac%7BZ%5B%5Cbeta-t%5D%7D%7BZ%5B%5Cbeta%5D%7D%7E.+%5C+%5C+%5C+%5C+%5C+%287%29&bg=ffffff&fg=000000&s=0&c=20201002)
![{Z[\beta]}](https://s0.wp.com/latex.php?latex=%7BZ%5B%5Cbeta%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) is not the moment generating function, but there’s clearly a close relationship between the two. Rather, the precise statement is that the moment generating function
is not the moment generating function, but there’s clearly a close relationship between the two. Rather, the precise statement is that the moment generating function  is the ratio of two partition functions at inverse temperatures
is the ratio of two partition functions at inverse temperatures  and
and ![\displaystyle \langle E^n\rangle=M^{(n)}(t)\Big|_{t=0} =\frac{1}{Z[\beta]}\frac{\partial^n}{\partial t^n}Z[\beta\!-\!t]\bigg|_{t=0} =(-1)^n\frac{Z^{(n)}[\beta\!-\!t]}{Z[\beta]}\bigg|_{t=0} =(-1)^n\frac{Z^{(n)}[\beta]}{Z[\beta]}~. \ \ \ \ \ (8)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Clangle+E%5En%5Crangle%3DM%5E%7B%28n%29%7D%28t%29%5CBig%7C_%7Bt%3D0%7D+%3D%5Cfrac%7B1%7D%7BZ%5B%5Cbeta%5D%7D%5Cfrac%7B%5Cpartial%5En%7D%7B%5Cpartial+t%5En%7DZ%5B%5Cbeta%5C%21-%5C%21t%5D%5Cbigg%7C_%7Bt%3D0%7D+%3D%28-1%29%5En%5Cfrac%7BZ%5E%7B%28n%29%7D%5B%5Cbeta%5C%21-%5C%21t%5D%7D%7BZ%5B%5Cbeta%5D%7D%5Cbigg%7C_%7Bt%3D0%7D+%3D%28-1%29%5En%5Cfrac%7BZ%5E%7B%28n%29%7D%5B%5Cbeta%5D%7D%7BZ%5B%5Cbeta%5D%7D%7E.+%5C+%5C+%5C+%5C+%5C+%288%29&bg=ffffff&fg=000000&s=0&c=20201002)
 ). Of course, this is simply a more formal expression for the usual thermodynamic expectation values. The first moment of energy, for example, is
). Of course, this is simply a more formal expression for the usual thermodynamic expectation values. The first moment of energy, for example, is![\displaystyle \langle E\rangle= -\frac{1}{Z[\beta]}\frac{\partial Z[\beta]}{\partial\beta} =\frac{1}{Z[\beta]}\sum_i E_ie^{-\beta E_i} =\sum_i E_i\,p_i~, \ \ \ \ \ (9)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Clangle+E%5Crangle%3D+-%5Cfrac%7B1%7D%7BZ%5B%5Cbeta%5D%7D%5Cfrac%7B%5Cpartial+Z%5B%5Cbeta%5D%7D%7B%5Cpartial%5Cbeta%7D+%3D%5Cfrac%7B1%7D%7BZ%5B%5Cbeta%5D%7D%5Csum_i+E_ie%5E%7B-%5Cbeta+E_i%7D+%3D%5Csum_i+E_i%5C%2Cp_i%7E%2C+%5C+%5C+%5C+%5C+%5C+%289%29&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle K_E(t)=\ln\langle e^{tE}\rangle=\ln Z[\beta\!-\!t]-\ln Z[\beta]~. \ \ \ \ \ (10)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+K_E%28t%29%3D%5Cln%5Clangle+e%5E%7BtE%7D%5Crangle%3D%5Cln+Z%5B%5Cbeta%5C%21-%5C%21t%5D-%5Cln+Z%5B%5Cbeta%5D%7E.+%5C+%5C+%5C+%5C+%5C+%2810%29&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle \begin{aligned} K^{(1)}(t)\big|_{t=0}&=-\frac{Z'[\beta]}{Z[\beta]}=\langle E\rangle~,\\ K^{(2)}(t)\big|_{t=0}&=\frac{Z''[\beta]}{Z[\beta]}-\left(\frac{Z'[\beta]}{Z[\beta]}\right)^2=\langle E^2\rangle-\langle E\rangle^2\\ K^{(3)}(t)\big|_{t=0}&=-2\left(\frac{Z'[\beta]}{Z[\beta]}\right)^3+3\frac{Z'[\beta]Z''[\beta]}{Z[\beta]^2}-\frac{Z^{(3)}[\beta]}{Z[\beta]}\\ &=-2\langle E\rangle^3+3\langle E\rangle\langle E^2\rangle-\langle E^3\rangle =-\left\langle\left( E-\langle E\rangle\right)^3\right\rangle~. \end{aligned} \ \ \ \ \ (11)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Baligned%7D+K%5E%7B%281%29%7D%28t%29%5Cbig%7C_%7Bt%3D0%7D%26%3D-%5Cfrac%7BZ%27%5B%5Cbeta%5D%7D%7BZ%5B%5Cbeta%5D%7D%3D%5Clangle+E%5Crangle%7E%2C%5C%5C+K%5E%7B%282%29%7D%28t%29%5Cbig%7C_%7Bt%3D0%7D%26%3D%5Cfrac%7BZ%27%27%5B%5Cbeta%5D%7D%7BZ%5B%5Cbeta%5D%7D-%5Cleft%28%5Cfrac%7BZ%27%5B%5Cbeta%5D%7D%7BZ%5B%5Cbeta%5D%7D%5Cright%29%5E2%3D%5Clangle+E%5E2%5Crangle-%5Clangle+E%5Crangle%5E2%5C%5C+K%5E%7B%283%29%7D%28t%29%5Cbig%7C_%7Bt%3D0%7D%26%3D-2%5Cleft%28%5Cfrac%7BZ%27%5B%5Cbeta%5D%7D%7BZ%5B%5Cbeta%5D%7D%5Cright%29%5E3%2B3%5Cfrac%7BZ%27%5B%5Cbeta%5DZ%27%27%5B%5Cbeta%5D%7D%7BZ%5B%5Cbeta%5D%5E2%7D-%5Cfrac%7BZ%5E%7B%283%29%7D%5B%5Cbeta%5D%7D%7BZ%5B%5Cbeta%5D%7D%5C%5C+%26%3D-2%5Clangle+E%5Crangle%5E3%2B3%5Clangle+E%5Crangle%5Clangle+E%5E2%5Crangle-%5Clangle+E%5E3%5Crangle+%3D-%5Cleft%5Clangle%5Cleft%28+E-%5Clangle+E%5Crangle%5Cright%29%5E3%5Cright%5Crangle%7E.+%5Cend%7Baligned%7D+%5C+%5C+%5C+%5C+%5C+%2811%29&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle K_E(\beta)\equiv-\ln Z[\beta] \qquad\implies\qquad \kappa_n=(-1)^{n-1}K_E^{(n)}(\beta)~, \ \ \ \ \ (12)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+K_E%28%5Cbeta%29%5Cequiv-%5Cln+Z%5B%5Cbeta%5D+%5Cqquad%5Cimplies%5Cqquad+%5Ckappa_n%3D%28-1%29%5E%7Bn-1%7DK_E%5E%7B%28n%29%7D%28%5Cbeta%29%7E%2C+%5C+%5C+%5C+%5C+%5C+%2812%29&bg=ffffff&fg=000000&s=0&c=20201002)
![{F[\beta]=-\beta^{-1}\ln Z[\beta]}](https://s0.wp.com/latex.php?latex=%7BF%5B%5Cbeta%5D%3D-%5Cbeta%5E%7B-1%7D%5Cln+Z%5B%5Cbeta%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) ? Given the form (12), one sees that they’re essentially one and the same, up to a factor of
? Given the form (12), one sees that they’re essentially one and the same, up to a factor of 
 is the Boltzmann distribution (6). However, the factor of
is the Boltzmann distribution (6). However, the factor of  — that serves as the cumulant generating function for the distribution. We’ll return to this idea momentarily, cf. (21) below.
— that serves as the cumulant generating function for the distribution. We’ll return to this idea momentarily, cf. (21) below.![\displaystyle Z[J]=\mathcal{N}\int\mathcal{D}\phi\,\exp\left\{i\!\int\!\mathrm{d}^dx\left[\mathcal{L}(\phi,\partial\phi)+J(x)\phi(x)\right]\right\} \ \ \ \ \ (14)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+Z%5BJ%5D%3D%5Cmathcal%7BN%7D%5Cint%5Cmathcal%7BD%7D%5Cphi%5C%2C%5Cexp%5Cleft%5C%7Bi%5C%21%5Cint%5C%21%5Cmathrm%7Bd%7D%5Edx%5Cleft%5B%5Cmathcal%7BL%7D%28%5Cphi%2C%5Cpartial%5Cphi%29%2BJ%28x%29%5Cphi%28x%29%5Cright%5D%5Cright%5C%7D+%5C+%5C+%5C+%5C+%5C+%2814%29&bg=ffffff&fg=000000&s=0&c=20201002)
 :
:![\displaystyle G^{(n)}(x_1,\ldots,x_n)=\frac{1}{i^n}\frac{\delta^nZ[J]}{\delta J(x_1)\ldots\delta J(x_n)}\bigg|_{J=0}~, \ \ \ \ \ (15)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+G%5E%7B%28n%29%7D%28x_1%2C%5Cldots%2Cx_n%29%3D%5Cfrac%7B1%7D%7Bi%5En%7D%5Cfrac%7B%5Cdelta%5EnZ%5BJ%5D%7D%7B%5Cdelta+J%28x_1%29%5Cldots%5Cdelta+J%28x_n%29%7D%5Cbigg%7C_%7BJ%3D0%7D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2815%29&bg=ffffff&fg=000000&s=0&c=20201002)
 is fixed by demanding that in the absence of sources, we should recover the vacuum expectation value, i.e.,
is fixed by demanding that in the absence of sources, we should recover the vacuum expectation value, i.e., ![{Z[0]=\langle0|0\rangle=1}](https://s0.wp.com/latex.php?latex=%7BZ%5B0%5D%3D%5Clangle0%7C0%5Crangle%3D1%7D&bg=ffffff&fg=000000&s=0&c=20201002) . In the language of Feynman diagrams, the Green function contains all possible graphs — both connected and disconnected — that contribute to the corresponding transition amplitude. For example, the 4-point correlator of
. In the language of Feynman diagrams, the Green function contains all possible graphs — both connected and disconnected — that contribute to the corresponding transition amplitude. For example, the 4-point correlator of  theory contains, at first order in the coupling, a disconnected graph consisting of two Feynman propagators, another disconnected graph consisting of a Feynman propagator and a 1-loop diagram, and an irreducible graph consisting of a single 4-point vertex. But only the last of these contributes to the scattering process, so it’s often more useful to work with the generating function for connected diagrams only,
theory contains, at first order in the coupling, a disconnected graph consisting of two Feynman propagators, another disconnected graph consisting of a Feynman propagator and a 1-loop diagram, and an irreducible graph consisting of a single 4-point vertex. But only the last of these contributes to the scattering process, so it’s often more useful to work with the generating function for connected diagrams only, ![\displaystyle W[J]=-i\ln Z[J]~, \ \ \ \ \ (16)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+W%5BJ%5D%3D-i%5Cln+Z%5BJ%5D%7E%2C+%5C+%5C+%5C+%5C+%5C+%2816%29&bg=ffffff&fg=000000&s=0&c=20201002)
 :
:![\displaystyle G_c^{(n)}(x_1,\ldots,x_n)=\frac{1}{i^{n-1}}\frac{\delta^nW[J]}{\delta J(x_1)\ldots\delta J(x_n)}\bigg|_{J=0}~. \ \ \ \ \ (17)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+G_c%5E%7B%28n%29%7D%28x_1%2C%5Cldots%2Cx_n%29%3D%5Cfrac%7B1%7D%7Bi%5E%7Bn-1%7D%7D%5Cfrac%7B%5Cdelta%5EnW%5BJ%5D%7D%7B%5Cdelta+J%28x_1%29%5Cldots%5Cdelta+J%28x_n%29%7D%5Cbigg%7C_%7BJ%3D0%7D%7E.+%5C+%5C+%5C+%5C+%5C+%2817%29&bg=ffffff&fg=000000&s=0&c=20201002)
![{Z[J]=\exp{i W[J]}}](https://s0.wp.com/latex.php?latex=%7BZ%5BJ%5D%3D%5Cexp%7Bi+W%5BJ%5D%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) , is not obvious at first glance, but it is a basic exercise in one’s first QFT course to show that the coefficients of various diagrams indeed work out correctly by simply Taylor expanding the exponential
, is not obvious at first glance, but it is a basic exercise in one’s first QFT course to show that the coefficients of various diagrams indeed work out correctly by simply Taylor expanding the exponential  . In the example of
. In the example of  into
into  with
with  . The factor of
. The factor of  in (16) goes away in Euclidean signature, whereupon we see that
in (16) goes away in Euclidean signature, whereupon we see that ![{Z[J]}](https://s0.wp.com/latex.php?latex=%7BZ%5BJ%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) is analogous to
is analogous to ![{W[J]}](https://s0.wp.com/latex.php?latex=%7BW%5BJ%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) is analogous to
is analogous to ![{\beta F[\beta]}](https://s0.wp.com/latex.php?latex=%7B%5Cbeta+F%5B%5Cbeta%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) — and hence plays the role of the cumulant generating function in the form (12).
— and hence plays the role of the cumulant generating function in the form (12). -point correlator
-point correlator  becomes
becomes
 are zero. (For a probabilist’s exposition on the relationship between cumulants and connectivity, see the first of three lectures by Novak and LaCroix [1], which takes a more graph-theoretic approach).
are zero. (For a probabilist’s exposition on the relationship between cumulants and connectivity, see the first of three lectures by Novak and LaCroix [1], which takes a more graph-theoretic approach).![{\Gamma[\phi]}](https://s0.wp.com/latex.php?latex=%7B%5CGamma%5B%5Cphi%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) , defined as the Legendre transform of
, defined as the Legendre transform of ![\displaystyle \Gamma[\phi]=W[J]-\int\!\mathrm{d} x\,J(x)\phi(x)~. \ \ \ \ \ (19)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5CGamma%5B%5Cphi%5D%3DW%5BJ%5D-%5Cint%5C%21%5Cmathrm%7Bd%7D+x%5C%2CJ%28x%29%5Cphi%28x%29%7E.+%5C+%5C+%5C+%5C+%5C+%2819%29&bg=ffffff&fg=000000&s=0&c=20201002)

 (13) obscures the duality between the properly dimensionless quantities
(13) obscures the duality between the properly dimensionless quantities  . From this perspective, it is more natural to work with
. From this perspective, it is more natural to work with  instead, in which case we have both an elegant expression for the duality in terms of the Legendre transform, and a precise identification of the dimensionless free energy with the cumulant generating function (12):
instead, in which case we have both an elegant expression for the duality in terms of the Legendre transform, and a precise identification of the dimensionless free energy with the cumulant generating function (12): 
 represent the outcome of some measurement or operation (e.g., a coin toss); then the mean after
represent the outcome of some measurement or operation (e.g., a coin toss); then the mean after 

 is the aforementioned rate function. The formal similarity with the partition function in terms of the effective action,
is the aforementioned rate function. The formal similarity with the partition function in terms of the effective action,  , is obvious, though the precise dictionary between the two languages is not. I suspect that a precise translation between the two languages — physics and information theory — can be made here as well, in which the increasing rarity of events as one moves along the tail of the distribution correspond to increasingly high-order corrections to the quantum effective action, but I haven’t worked this out in detail.
, is obvious, though the precise dictionary between the two languages is not. I suspect that a precise translation between the two languages — physics and information theory — can be made here as well, in which the increasing rarity of events as one moves along the tail of the distribution correspond to increasingly high-order corrections to the quantum effective action, but I haven’t worked this out in detail.